
Safety in Industrial Robotics and HRC
Within the research group “Safety in Industrial Robotics and HRC”, issues in the area of safety, in particular in the context of industry 4.0, are tackled.
One aspect refers to the development of tools that allow for the safe, yet simple and efficient deployment and operation of robots in manufacturing facilities. Specific examples are the development of semi-automated risk analysis methods and the automatic positioning of safety elements targeting the compliance of safety for the human operator in a given application scenario.
Another focus is laid on safe human robot cooperation (HRC), i.e. the “teamwork” of human and machine, which promises to give an efficiency boost to production. Topics here include the safe detection of humans using different sensors as well as the analysis and prediction of the human’s movement in order to enable the adaptation of the robot’s reaction accordingly.
Moreover, we conduct research on how to make unsafe code “safe” such that hazards on the human being as well as on the system can be avoided. In this context, algorithms based on learning algorithms are categorized as unsafe, but also - specifically in the context of our KUKA Robot Learning Lab - code developed by students or external research groups.
We also work with machine learning methods with the goal of using themselves for safety-critical functions. Based on dedicated investigations employing convolutional neural networks, it is targeted to allow for statements with respect to systematic uncertainties originating from such systems, ultimately enabling the provision of failure probabilities. Additionally, we make use of diverse AI-methods in order to use their superior performance with respect to human pose estimation for safe HRC.
Another focus area is safe on-line motion generation. In contrast to generating robot movements offline, online generation does not rely on predefined paths and the goal is for example to react instantaneous to unforeseen sensor signals. Trajectory generation should adhere to real-time constraints and be deterministic. It should be possible to react within one control cycle (typically between 1 and 5ms).
Key Research Areas
|
|
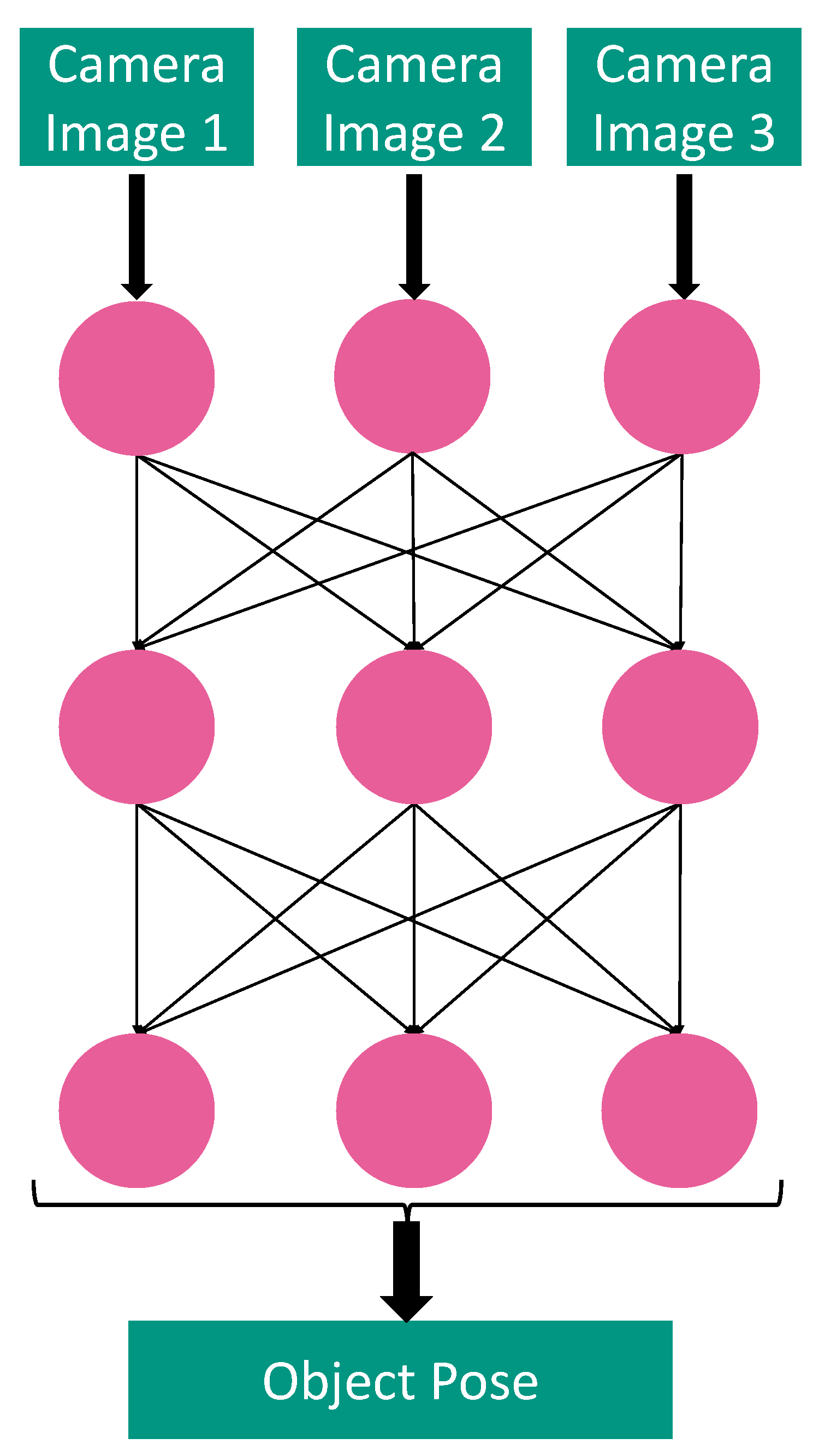
Neural Network for Classification of Safe and Critical Situations in HRIMachine learning algorithms are widely used in the domain of robotics. In particular, applications using reinforcement learning algorithms have led to promising results in industrial applications and thus gained attention in recent years. In the context of safe human robot collaboration however, the deployment of such algorithms is highly debatable: Since the exploration procedure of the agent requires the experience of dangerous situations, hazards on the human operator cannot be avoided. One step towards safe exploration strategies which is the focus of this work refers to the investigation of a neural network with respect to its suitability for classification purposes in human robot interaction scenarios. Doing this, it is targeted to gain a deeper understanding of the classification performance’s dependencies on several aspects and to thus allow for a statement on the significance of safety according to norms ISO 13855 and ISO 15066.
|
||
|
|
Safe Human-Robot Interaction and Cooperation with Dynamic Payload Uncertainties
The dynamic uncertainties of robots and the objects attached to them would result in the unstable interaction behavior, unsatisfactory trajectory accuracy and the unpredictable dynamic behavior in the case of emergency stop. A precise robot dynamical model is hence the basis to optimize the dynamic behavior in a human-robot-collaboration scenario. The precise model-identification is to achieve online by executing simple and trivial motion, which could be integrated into the trajectory heading to the desired end pose. Based on this precise dynamic model, adaptive compliant control algorithms should be developed to adjust to human intention, such that stable and safe interaction is preserved during the direct physical interaction. Furthermore, depended on multiple sources of sensor data, which reflects the circumstances of the environment and human behavior, a trajectory is to optimize or replan online under predefined constraints. This trajectory should guarantee safety and time-efficiency at the same time.
|
||
|
|
Safe On-line Motion Generation for Industrial Manipulators
In the KUKA Robot Learning Lab at KIT, students and researchers are able to control the robots in the lab with their submitted code. Motion inputs from the submitted source code need to be validated on-the-fly during motion generation to ensure that the robots cannot be damaged. This includes collision-free path planning and monitoring of the robot work cell using a vision system. The torque sensors of the robots’ joints are also used to detect unforeseen collisions and to safely stop the robot. Especially for these kind of reactions, it is important to consider the robots dynamics during motion generation to ensure that the calculated motions are executable. Furthermore, motions need to generated such that wear of the robotic hardware is reduced, e.g. avoiding jerky movements. This is especially important when the robots are operated for extended periods of time.
|
||
|
|
Simulation-based Hazard Identification for HRC ApplicationsRisk Assessment is a mandatory procedure for all automation systems. However, driven by trends such as Industry 4.0, Human-Robot-Collaboration (HRC), and Machine Learning, modern automation systems become more and more complex. Due to the increasing system complexity, it becomes much harder to identify potential hazards. Traditional approaches for hazard identification, which are typically based on experience, intuition and simple tools, such as checklists, are no longer capable of dealing with this kind of complexity. Meanwhile, advances in processing power make it possible to simulate more and more complex scenarios with an increasing level of detail. Therefore, we investigate how simulation of HRC systems can be used to uncover safety flaws. The tools that arise from this research can be used to augment the risk assessment process and find hidden safety flaws that would be overlooked when using only traditional methods.
|
||
|
|
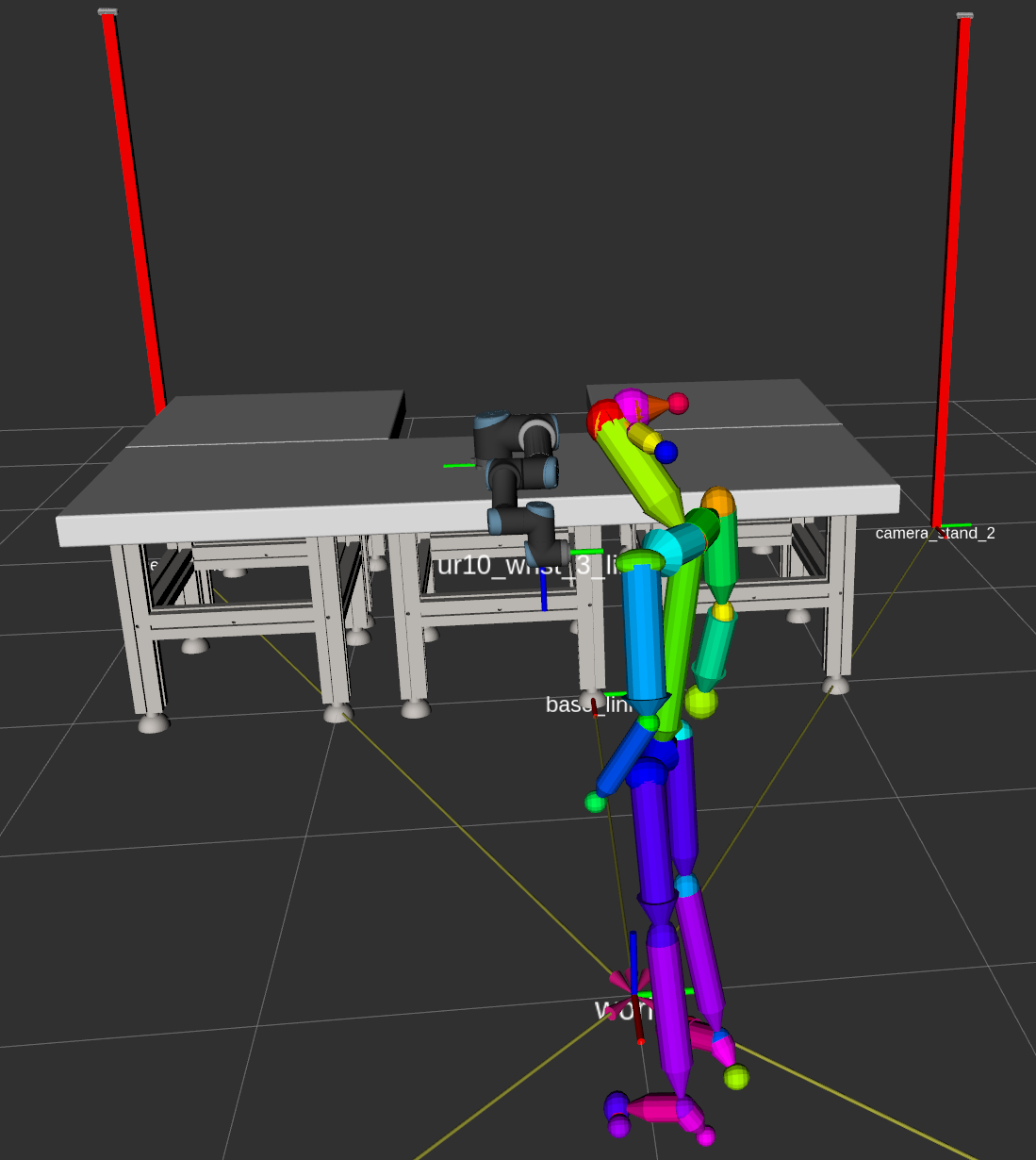
Safe Human Pose EstimationAs part of industry 4.0 the production moves away from the classical assembly line in favor of a more modular and dynamic production. As part of this change, classical, static protection mechanisms like the safety fence are vanishing. To ensure ongoing protection of humans, these mechanisms need to be replaced, for example with safety-certified laser scanners, which are way more mobile. They can be used to establish safety zones around for example robots. Violation of the safety zones is detected e.g. at the height of the legs, with the robot slowing down or stopping to ensure safety. As the position of the legs does not tell much about the pose of the rest of the body, the safety zones need to be quite large as they always need to cover the ‘worst case scenario’. Therefore, the robot is also slowing down or stopping even when there is no real threat to the human, resulting in delays and smaller throughput. To avoid unnecessary stops, a safe detection of the human pose can be performed, followed by an estimation of the actual distance from the nearest human body part to the robot. This information can also be used to determine an alternative trajectory for the robot, evading the human and becomes even more important when it comes to human-robot-interaction. For the task of human pose detection neural networks have been proven to be very suitable in the recent years, outperforming other approaches. Despite their brilliant performance, they can not be deployed for safety tasks because of their black box character. Therefore research is needed to determine how safe human pose detection for safety-critical tasks can be accomplished despite the fact that neural networks are used.
|
||



| name | title | phone | |
|---|---|---|---|
| Wiedmeyer, Wolfgang | M. Sc. | +49 721 608-46319 | wolfgang wiedmeyer ∂does-not-exist.kit edu |