
Safety in der industriellen Robotik und MRK
Die Forschungsgruppe “Safety in der industrieller Robotik und MRK” beschäftigt sich mit verschiedenen Facetten der funktionalen Sicherheit in robotischen Anwendungen, insbesondere im Kontext Industrie 4.0.
Darunter fällt unter anderem die Entwicklung von unterstützenden Tools, mit denen Unternehmen in ihrem Betrieb Roboter schneller und einfacher, aber dennoch sicher einsetzen können. Konkrete Beispiele umfassen eine teilautomatisierte Risikoanalyse sowie die automatisierte Platzierung von Sicherheitselementen zur Gewährleistung der Sicherheit für Menschen in der Anlage.
Ein weiterer Forschungsschwerpunkt ist die sichere Mensch-Roboter-Kooperation, also die Zusammenarbeit von Mensch und Maschine, von der sich die Produktion einen enormen Effizienzzuwachs verspricht. Hierzu zählen die sichere Erfassung von Menschen mit verschiedenen Sensoren sowie die Analyse der Bewegungen des Menschen und die entsprechende Prädiktion der nachfolgenden Bewegung, sodass der Roboter sichere Trajektorien berechnen kann.
Darüber hinaus wird an Methoden geforscht, wie unsichere Codes durch Sicherheitsvorkehrungen “sicher” gemacht werden kann, sodass Schaden an Mensch oder Maschine verhindert wird. Als unsicherer Code gilt hier z.B. Code aus gelernten Verfahren (KI), aber auch speziell im Rahmen unseres KUKA Robot Learning Labs Code von Studenten bzw. institutsexternen Forschungsgruppen.
Wir arbeiten aber auch mit Maschinellen Lernverfahren, um eben diese selbst für sicherheitsgerichtete Funktionen einsetzen zu können. Einerseits soll dafür ein tieferes Verständnis für neuronale Netze entwickelt werden, um Aussagen über die systematische Unsicherheit darauf basierender Systeme treffen zu können, und somit Ausfall- bzw. Fehlerwahrscheinlichkeiten angeben zu können. Andererseits setzen wir unterschiedliche KI-Verfahren ein, um z.B. deren überlegene Performance im Hinblick auf Menscherkenung für sichere MRK nutzen zu können.
Zudem werden Verfahren der sicheren Online-Bewegungsgenerierung untersucht. Im Gegensatz zu einer Offlineerzeugung von Roboterbewegungen existieren bei der Onlinemethode keine vorbestimmten Bewegungspfade und die Zielsetzung ist beispielsweise eine möglichst schnelle Reaktion auf Sensorsignale. Die Generierung soll dabei in Echtzeit erfolgen und deterministisch sein. Bestenfalls soll es möglich sein, innerhalb eines Regeltaktes (typischerweise zwischen 1-5ms) reagieren zu können.
Schwerpunkte
|
|
Neuronale Netze zur Klassifizierung von sicherheitskritischen Situationen in HRIApplikationen basierend auf maschinellen Lernalgorithmen finden aufgrund ihrer Effizienz in der Robotik vermehrt Anwendung. Insbesondere der Einsatz von Reinforcement Learning Algorithmen hat zu vielversprechenden Ergebnissen im Bereich der Industrierobotik geführt. Im Kontext der funktionalen Sicherheit hingegen sind Ansätze unter Verwendung von Methoden des Reinforcement Learnings stark umstritten, da im Exploration-Prozess gefährliche Situationen nicht gescheit umgangen werden können. Ein erster Ansatz, der langfristig zur Entwicklung von Safe Exploration Strategies beitragen könnte, ist die Untersuchung einer neuronalen Netzarchitektur auf die Einsetzbarkeit für Klassifikationen von sicheren und kritischen Situationen in der Mensch-Roboter Kollaboration. Ziel dieser Arbeit ist es, die Aussagekraft über die Performanz dieses entwickelten neuronalen Netzes hinsichtlich ihrer Signifikanz bezüglich der Normen ISO 13855 und ISO 15066 zu untersuchen.
|
||
|
|
Sichere Mensch-Roboter-Interaktion und Kooperation mit dynamischen Payload-UnsicherheitenDie dynamische Unsicherheit sowie Ungenauigkeit des Roboters und der vom Endeffektor gegriffenen Objekts können instabile Interaktionsverhalten, unbefriedigenden Ausführungsgenauigkeit der Trajektorien und unprediktierbare dynamische Verhalten im Falle eines Notbremsens verursachen. Ein präzises dynamisches Modell bzgl. des Roboters und unbekannten Objekts ist daher das Fundament zur Optimierung des dynamischen Verhaltens des Roboters in einem MRI-Szenario. Eine Methode soll entwickelt werden, damit die präzise Modellidentifikation online durch einfache und triviale Bewegungen erfolgt, die in den Trajektorien zur gewünschten Endpose integriert werden können. Basierend auf dem präzisen identifizierten Modell sollten modellbasierte Regelungsalgorithmen so entworfen werden, dass der Roboter sein dynamisches Verhalten während direkter physikalischer Interaktionen für die menschliche Intention adaptiert. Darüber hinaus muss die Trajektorie des Roboters online mithilfe unterschiedlicher Arten von Sensordaten optimiert oder erneut geplant werden. Bei der Optimierung oder Planung sollten die Rahmenbedingungen so definiert werden, dass die Trajektorie nicht nur Sicherheit sondern auch Zeiteffizienz zugleich gewährleisten kann.
|
||
|
|
Sichere Online Bewegungsgenerierung für IndustrieroboterDas KUKA Robot Learning Lab am KIT ermöglicht Studenten und Forschern die Roboter im Labor mit ihrem eingereichten Programmen zu steuern. Bewegungsbefehle, die durch die Programme vorgegeben werden, müssen zur Ausführungszeit dahingehend ausgewertet werden, dass Schäden an den Robotern vermieden werden. Dies beinhaltet eine kollisionsfreie Bewegungsplanung und erfordert eine kamerabasierte Überwachung der Roboterzelle. Die Momentensensoren in den Robotergelenken werden auch genutzt, um unvorhergesehene Kollisionen zu erkennen und dann den Roboter sicher zum Stillstand zu bringen. Hierbei muss auch die Dynamik des Roboters berücksichtigt werden, um die Ausführbarkeit der berechneten Bewegungen sicherzustellen. Außerdem muss bei der Bewegungsgenierung darauf geachtet werden, dass kein erhöhter Verschleiß der Hardware droht, z.B. durch Vermeiden von ruckartigen Bewegungen. Dies ist besonders wichtig, wenn die Roboter durchgehend über lange Zeiträume hinweg betrieben werden.
|
||
|
|
Simulationsbasierte Gefährdungsidentifikation von MRK-AnlagenFür jede Automatisierungsanlage muss eine Risikobeurteilung durchgeführt werden, bevor sie in den Verkehr gebracht wird. Doch getrieben durch Trends wie Industrie 4.0, Mensch-Roboter-Kollaboration (MRK) und Künstlicher Intelligenz werden moderne Automatisierungs-anlagen immer komplexer. Somit wird es auch immer schwieriger, mögliche Gefährdungs-potentiale in Anlagen zu erkennen. Klassische Ansätze zur Identifikation von Gefährdungen, die typischerweise auf Erfahrung, Intuition und einfachen Hilfsmitteln wie z.B. Checklisten basieren, stoßen an ihre Grenzen. Gleichzeitig bieten stetig steigende Rechnerkapazitäten die Möglichkeit, eine Vielzahl von komplexen Szenarien und Abläufen in Simulationen nachzubilden. Daher erforschen wir, wie Simulationen zur Aufdeckung von Sicherheitslücken verwendet werden können. Die so entstehenden Simulationswerkzeuge können ergänzend zur klassischen Gefährdungsidentifikation verwendet werden und sollen auch Sicherheitslücken aufdecken, die im klassischen Risikobeurteilungsprozess ggf. übersehen worden wären.
|
||
|
|
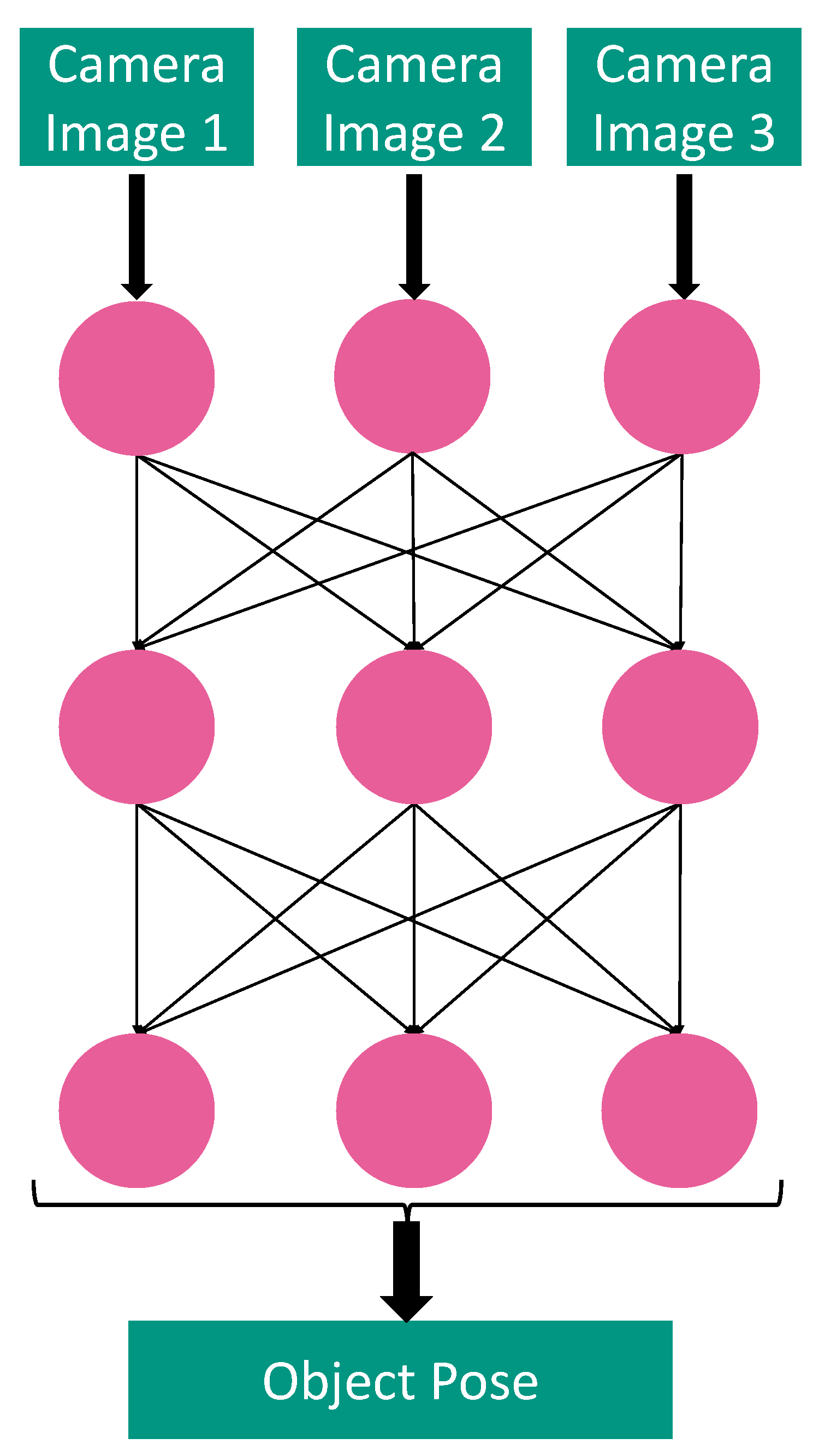
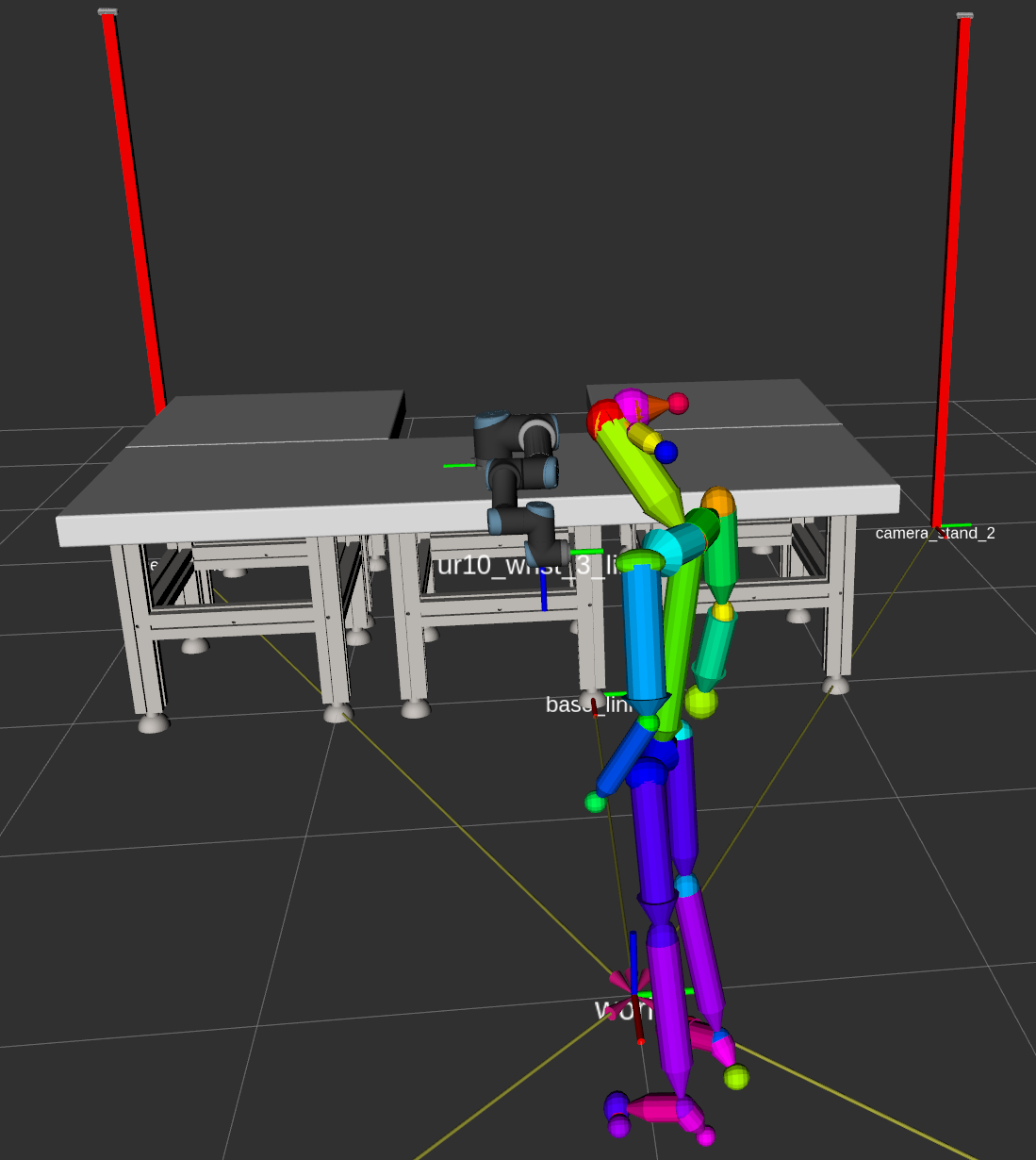
Sichere Posendetektion des MenschenIm Zuge von Industrie 4.0 bewegt sich der Trend weg von statischen Fertigungsstraßen hin zu einer modularisierten, dynamischen Produktion. Ein Merkmal dieser Umstrukturierung ist der Wegfall des klassischen, statischen Schutzzauns und vergleichbarer Einrichtungen. Um Sicherheit trotzdem gewährleisten zu können, kommen beispielsweise vergleichbar mobile, sicherheitszertifizierte Laserscanner zum Einsatz, mit denen sich Schutzzonen um beispielsweise Roboter einrichten lassen. Ein Eindringen in diese Schutzzone kann beispielsweise auf Höhe der Beine detektiert - anschließend wird der Roboter verlangsamt oder gestoppt. Da die restliche Position des Körpers unbekannt ist müssen hohe Sicherheitsaufschläge auf die Größe der Sicherheitszonen angewendet werden, um eine mögliche Gefährdung von Personen auszuschließen. Dies hat zur Folge, dass der Roboter auch unnötigerweise verlangsamt oder angehalten wird, was zu einer Verringerung des Durchsatzes führt. Um unnötige Stops zu vermeiden, soll eine sichere Detektion der Pose des Menschen durchgeführt werden, um den tatsächlichen Abstand der Person zum Roboter abschätzen und falls nötig frühzeitig ein Ausweichen durch den Roboter zu erreichen. Noch wichtiger wird die Posendetektion, wenn es zur Mensch-Roboter-Kollaboration kommen soll. Für die Posendetektion haben sich in den letzten Jahren vor allem Neuronale Netze als besonders nützlich erwiesen, die trotz hervorragender Resultate aufgrund ihres Blackbox-Charakters nicht ohne weiteres in Sicherheitskritischen Szenarios eingesetzt werden dürfen. Daher soll erforscht werden, wie trotz dem Einsatz von Neuronalen Netzen eine ausreichend sichere Posendetektion für den Einsatz in sicherheitskritischen Szenarien erreicht werden kann.
|
||



| Name | Titel | Tel. | |
|---|---|---|---|
| Wiedmeyer, Wolfgang | M. Sc. | +49 721 608-46319 | wolfgang wiedmeyer ∂does-not-exist.kit edu |