KIT - Karlsruher Institut für Technologie
Institut für Anthropomatik und Robotik (IAR) - Intelligente Prozessautomation und Robotik (IPR)
Navigation überspringen
Home
Impressum
Datenschutz
Barrierefreiheit
KIT
en
suchen
suchen
Home
Mitarbeiter
Forschung
Start
Forschung
Forschung
Intelligente Industrieroboter (IIROB)
Start
Forschung
Intelligente Industrieroboter (IIROB)
Intelligente Industrieroboter (IIROB)
Projekte
Safety in der industriellen Robotik und MRK
Robot Learning
Projektübersicht
Publikationen
News
Start
News
News
Wolfgang_Promo
Xi_Promo
Alex_Promo
Patrick_Promo
Kiemel_Promo
Marzi_Promo
News Archiv
Studium und Lehre
Start
Studium und Lehre
Studium und Lehre
Vorlesungen
Klausuren
Seminare / Proseminare
Praktika
Abschlussarbeiten
Stellenangebote
Anfahrt
Alumni
Start
Alumni
Alumni
Robotik-Alumni-Club
YouTube
Startups
Publikationen
Startseite
Home
Impressum
Datenschutz
Barrierefreiheit
suchen
suchen
Institut für Anthropomatik und Robotik (IAR) - Intelligente Prozessautomation und Robotik (IPR)
Startseite
Abschlussarbeiten
Startseite
Home
Mitarbeiter
Forschung
News
Studium und Lehre
Abschlussarbeiten
Stellenangebote
Anfahrt
Alumni
YouTube
Startups
Publikationen
Abschlussarbeiten
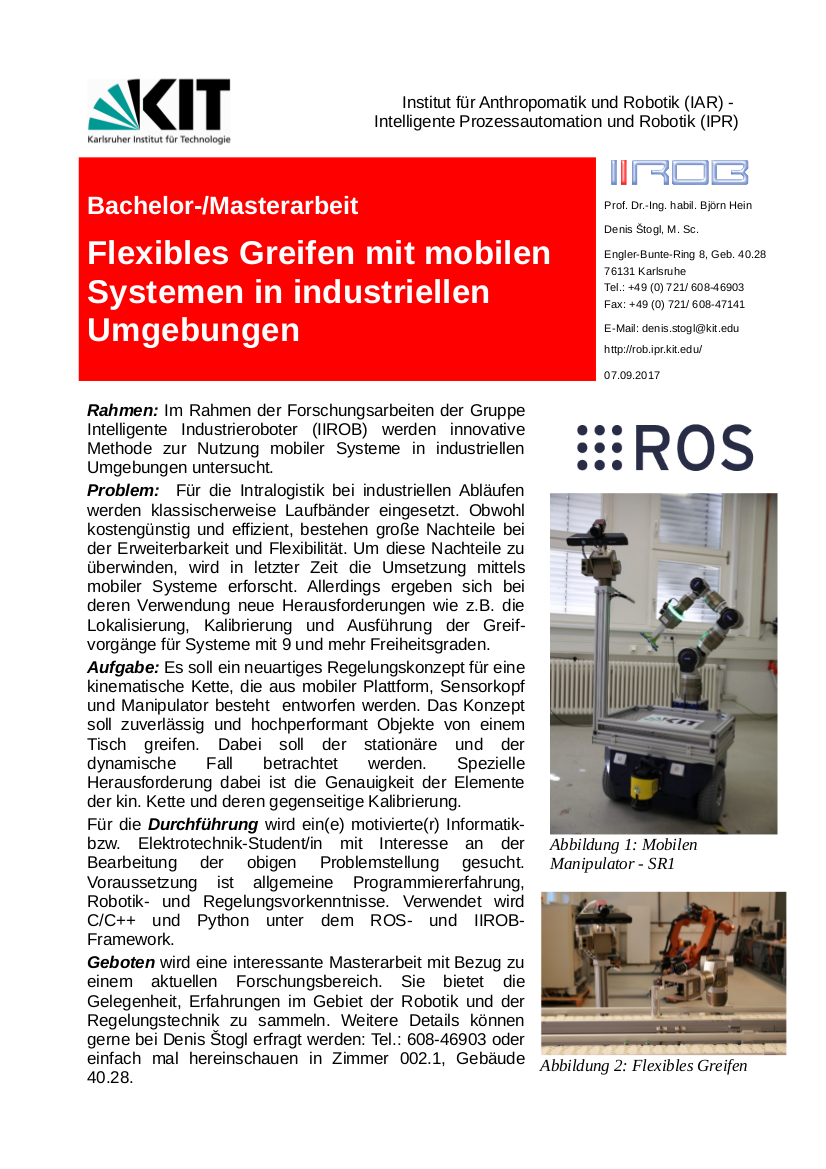
Flexibles Greifen mit mobilen Systemen in industriellen Umgebungen
Forschungsthema:
Mobile Manipulation
Typ:
Bachelor-/Masterarbeit
Datum:
September 2017
Betreuung:
Štogl, Denis