KIT - Karlsruhe Institute of Technology
image/svg+xml
Institute for Anthropomatics and Robotics - Intelligent Process Automation and Robotics Lab
skip navigation
Home
Legals
Privacy Policy
Accessibility
KIT
de
search
search
Home
Staff
Research
Start
Research
Research
Intelligent Industrial Robotics (IIROB)
Start
Research
Intelligent Industrial Robotics (IIROB)
Intelligent Industrial Robotics (IIROB)
Projects
Safety in Industrial Robotics and HRC
Robot Learning
Projects
Publikationen
News
Start
News
News
Wolfgang_Promo
Xi_Promo
Xi_Promo
Alex_Promo
Patrick_Promo
Kiemel_Promo
Marzi_Promo
Marzi_Promo
News Archive
Education
Start
Education
Education
Lectures
Exams
Thesis
Seminars / Proseminars
Laboratory
Theses
Jobs
Directions
Alumni
Start
Alumni
Alumni
Alumni-Club
YouTube
Startups
Publications via KITopen
Startpage
Home
Legals
Privacy Policy
Accessibility
search
search
Institute for Anthropomatics and Robotics - Intelligent Process Automation and Robotics Lab
Startpage
Theses
Home
Home
Staff
Research
News
Education
Theses
Jobs
Directions
Alumni
YouTube
Startups
Publications via KITopen
Theses
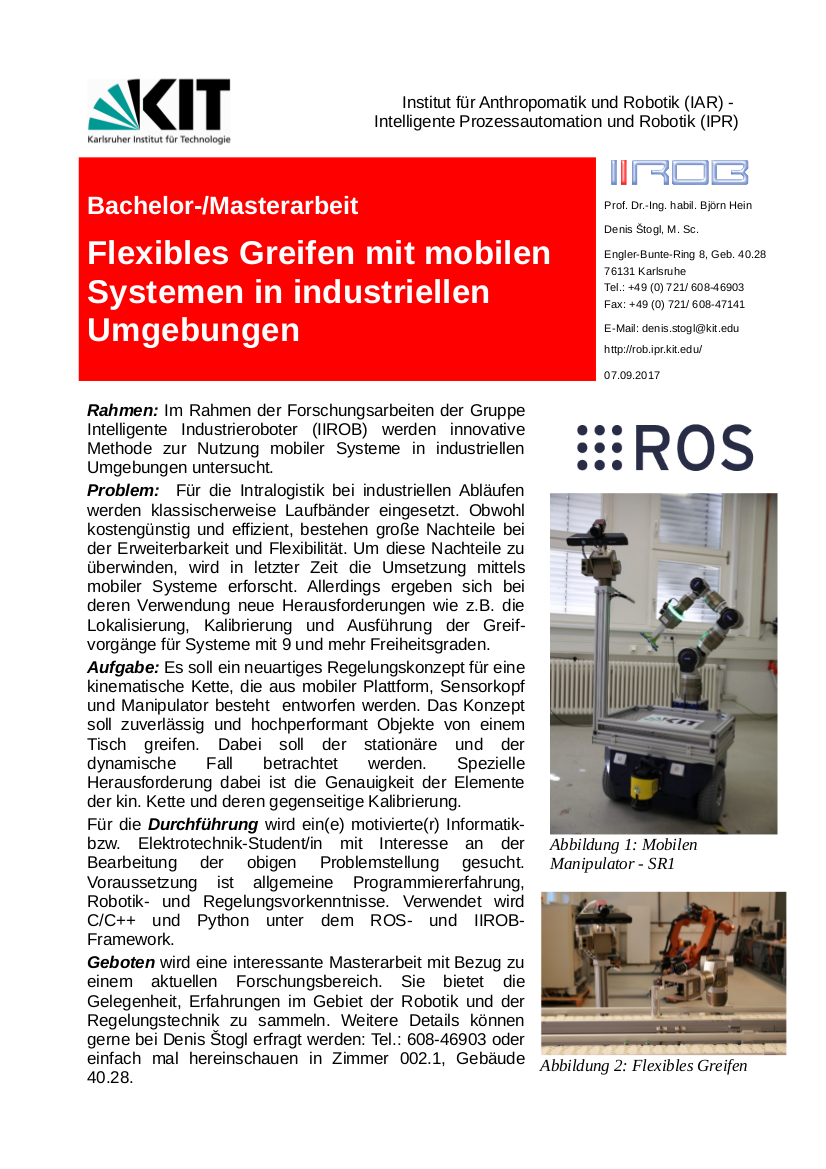
Flexibles Greifen mit mobilen Systemen in industriellen Umgebungen
subject:
Mobile Manipulation
type:
Bachelor-/Masterarbeit
date:
September 2017
tutor:
Štogl, Denis