
IRoProg (Innovative Roboter-Programmiermethoden)
- contact:
- project group:
- funding:
Bundesministerium für Bildung und Forschung (BMBF)
- startdate:
Dezember 2002
- enddate:
Dezember 2005
Roboter sind heute das bevorzugte Werkzeug zur Handhabung von Objekten in der flexiblen Fertigung. Sie werden vor allem bei großen Losgrößen eingesetzt (z.B. in der Automobilindustrie). Bei kleinen bis mittleren und häufig veränderlichen Losgrößen, wie sie besonders auch in kleinen und mittelständischen Unternehmen vorkommen, ist der Aufwand zur Programmierung des ganzen Robotersystems oft so hoch, dass ein Einsatz nicht rentabel ist.
Ziel dieses Projektes ist es, neue intuitive und automatische Programmierverfahren zu entwickeln, die diesen Programmieraufwand deutlich verringern, und zwar durch:
- intuitivere Ein- und Ausgabeverfahren bei der Offline-Programmierung,
- Verfahren aus dem Bereich der automatischen kollisionsfreien Bahnplanung,
- geeignete Sensor- und Prozessrückkopplungen und
- funktionales Einbeziehen des Menschen am Robotersystem.
Hierbei wird die gesamte Prozesskette von der Offline-Programmierung bis zur Inbetriebnahme vor Ort ganzheitlich betrachtet. Insbesondere wird der neuartige Ansatz verfolgt, Information aus CAD/CAM-Modellen und verschiedene Sensordaten sowie das Geschick des Menschen auf eine intuitive und verlässliche Art und Weise zu kombinieren und direkt in die Programmierung des gesamten Robotersystems eingehen zu lassen.
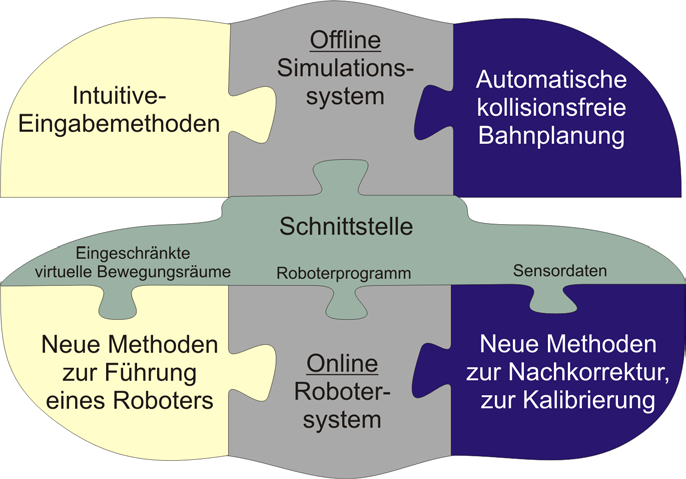
ABBILDUNG 1: Schematischer Aufbau des Gesamtsystems. Das System berücksichtigt den gesamten Prozess von Offline-Programmierung bis hin zur Online-Programmierung (Inbetriebnahme). Hierfür werden das Simulationssystem (offline) und die Steuerung des Robotersystems (online) durch neue Module und durch eine erweiterte Schnittstelle ergänzt.