AgiProbot – Agiles Produktionssystem mittels mobiler, lernender Roboter mit Multisensorik bei ungewissen Produktspezifikationen
- contact:
- funding:
Carl Zeiss Stiftung
- startdate:
März 2019
- enddate:
Febuar 2024
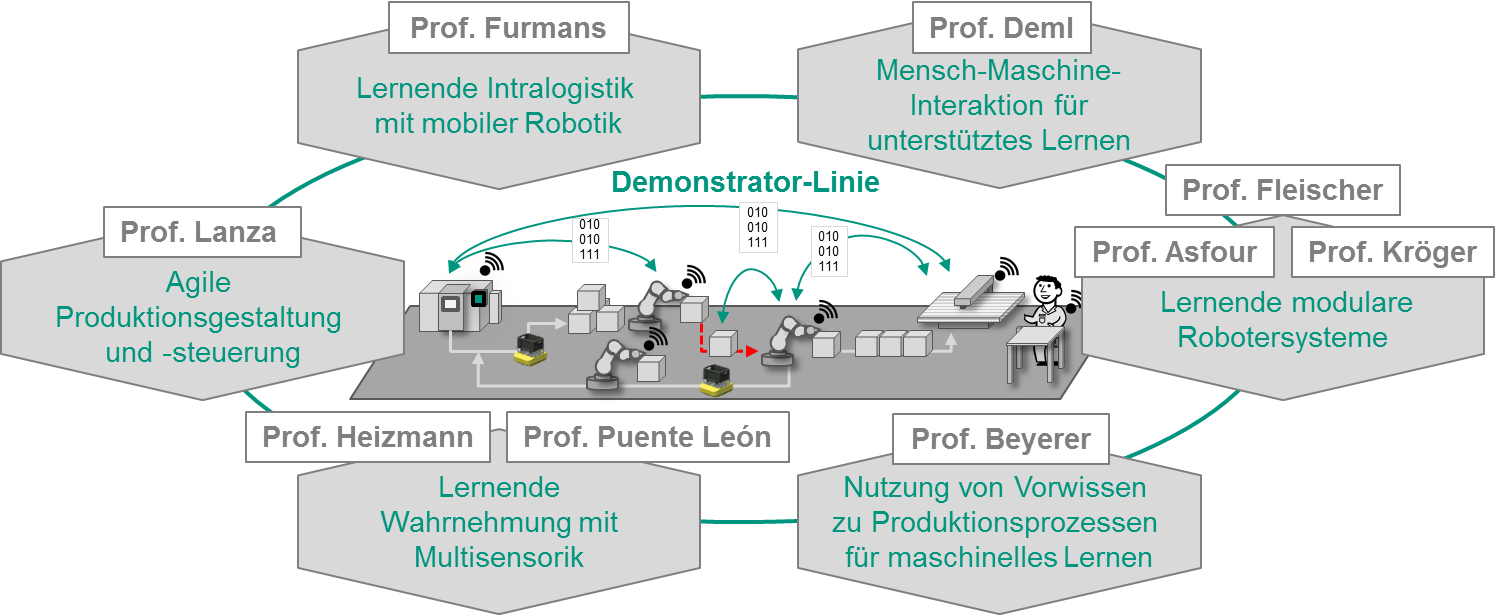
Ziel des Projektes AgiProbot ist es, eine Demonstrator-Fabrik für das Remanufacturing von Elektromotoren aus der Automobilindustrie zu entwickeln. Sie sollen in einem agilen und automatisierten Prozess demontiert und für die Wiederverwendung aufbereitet werden. Unter Federführung des Instituts für Produktionstechnik (wbk) beteiligen sich am KIT die Institute für Industrielle Informationstechnik (IIIT), für Anthropomatik und Robotik (IAR), für Fördertechnik und Logistiksysteme (IFL) und für Arbeitswissenschaft und Betriebsorganisation (ifab) an dem Projekt.
Zur Erreichen der erforderlichen Agilität der (Re-/De-)montageprozesse bei ungewissen Bauteil- und Umgebungszuständen werden Methoden entwickelt, um die erstellten Workflows der einzelnen Fertigkeiten situationsgerecht zu adaptieren. Hierfür bietet Reinforcement Learning in einer Simulation der Roboterabläufe einen vielversprechenden Ansatz, der am IAR-IPR im Rahmen des Projekts verfolgt werden wird.
Konkret sollen sog. Skill-Agenten der Funktion an realen Robotersystemen definiert und für diese digitale Zwillinge für weiteres Lernen in der Simulationsumgebung erzeugt (Transfer Learning) werden. Dies kann einerseits durch eine Anpassung der Skill-Agenten der realen Welt für eine ideale Simulation geschehen. Andererseits können die Skill-Agenten in der Simulation parallel zu ihren realen Zwillingen trainiert werden. In der Simulation soll ein Meta-Agent trainiert werden, die einzelnen Fertigkeiten der Skill-Agenten so zu kombi-nieren, dass effiziente Workflows für simulierte Demontageaufgaben generiert werden.