

Forschungsgebiete

Schwarmrobotik
In einem Roboterschwarm erledigen viele relativ einfache Roboter kooperativ Aufgaben, die sie alleine nicht bewältigen könnten. Die Vorteile gegenüber einem einzelnen größeren Roboter liegen dabei in der Flexibilität, Skalierbarkeit und Robustheit des Schwarms.
Miniatur-Schwarmroboter "Wanda"
Ein kostspieliger Faktor bei der Entwicklung und Analyse von Algorithmen für Roboterschwärme ist oft deren experimentelle Evaluation. Am IPR wurde daher von Marc Szymanski und Alexander Kettler im Rahmen des KIT-Projekts KITCoRoL der Miniatur Schwarmroboter Wanda entwickelt, der den bisher verwendeten Jasmine Roboter ersetzt. Das Ziel des KITCoRoL es ist, eine möglichst kostengünstige, einfach zu fertigende aber dennoch vielseitige und erweiterbare Platform für automatisierte Experimente mit kooperierenden Robotern zur Verfügung zu stellen. Dafür verfügt der Wanda-Roboter über eine Vielzahl von Sensoren, wie z.B Farbsensor, Helligkeitssensoren an der Vorder-/Ober-/ und Unterseite, Beschleunigungssensor oder Ladezustandssensor. Weitere Merkmale sind ein im Vergleich zum Jasmine Roboter wesentlich verbesserter Antrieb sowie eine robuste Infrarot Kommunikation mit integrierter Abstands-/ und Richtungsmessung die vor allem auch für die Verwendung in einem größeren Schwarm geeignet ist. Am IPR stehen zahlreiche Wanda Roboter sowie eine Arena für Schwarmexperimente zur Verfügung.
Simulation von Roboterschwärmen
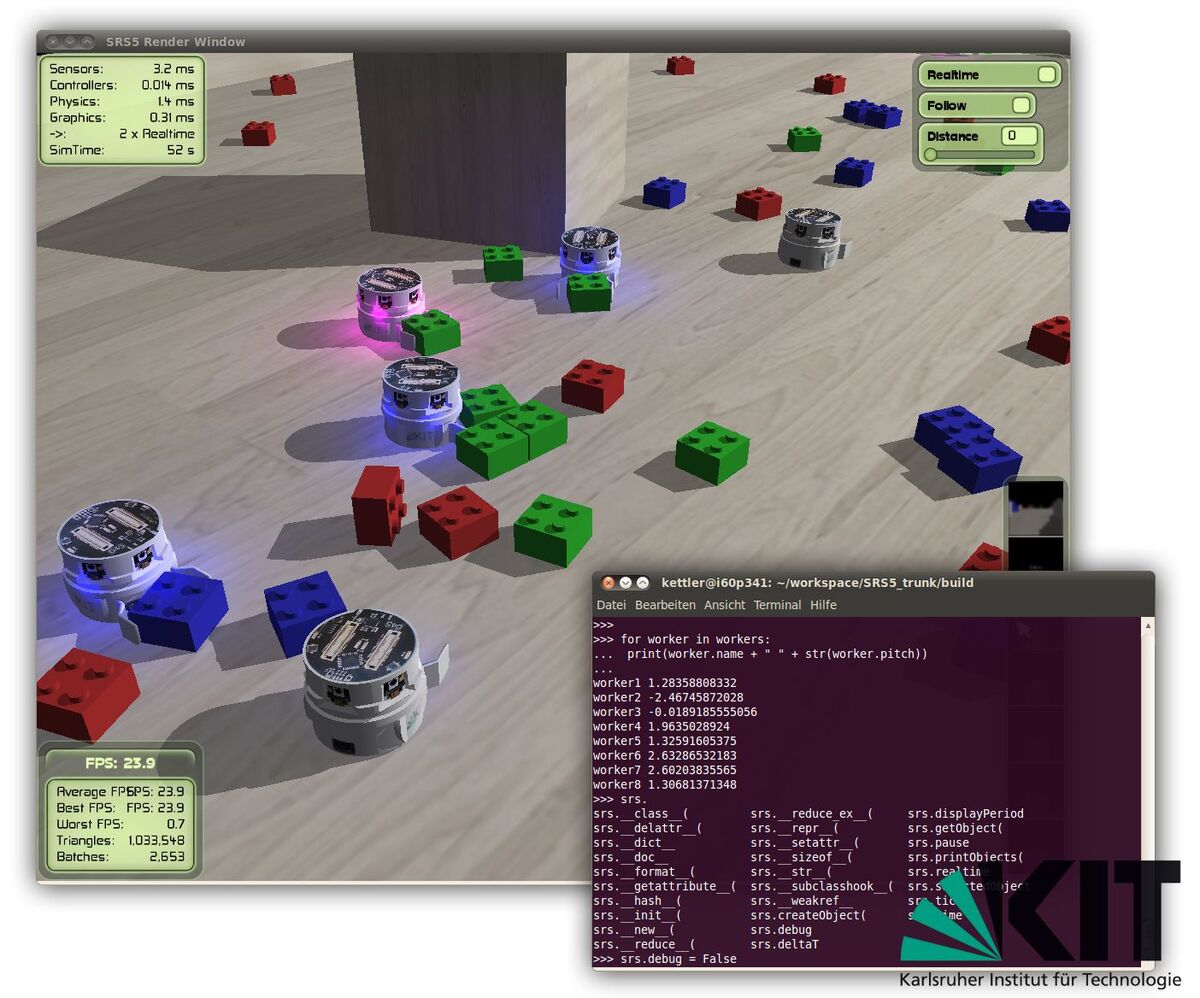
Die naheligendste Methode zum Entwurf und zur Analyse von Algorithmen für Roboterschwärme ist ihre Simulation. Durch die Vielzahl von Robotern kann dabei die Simulation von Sensordaten sehr rechenintensiv werden, insbesondere wenn auf akkurate Modellierung Wert gelegt wird. Am IPR wird daher eine flexible Simulationsumgebung für Schwarmroboter entwickelt, die solche Berechnungen auf die Grafikhardware auslagert. Sie wird verwendet um Experimente mit den Wanda-Robotern zu simulieren.
Räumliche Modelle von Roboterschwärmen
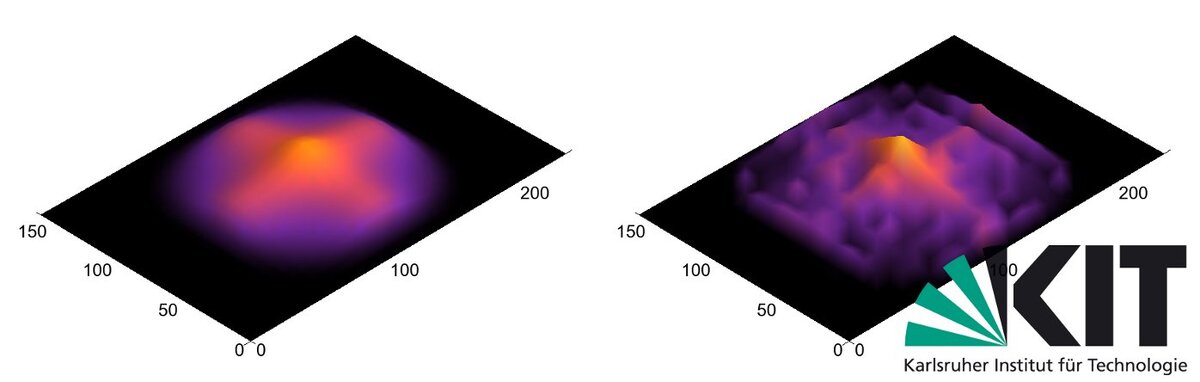
Die Modellierung von Schwarmverhalten mit mathematischen Modellen ist neben der Durchführung von Experimenten und der Simulation eine weitere Möglichkeit für eine systematische Analyse von Kontroll-Algorithmen für Roboterschwärme. Modelle in Anlehnung an die Boltzmann-Gleichung aus der statistischen Physik ermöglichen es, die räumliche Aufenthaltswahrscheinlichkeit und Geschwindigkeitsverteilung eines Roboterschwarms zu berechnen, ohne die einzelnen Individuen des Schwarms separat zu betrachten. Der Vorteil dabei ist die Unabhängigkeit des Rechenaufwands von der Größe des zu betrachtenden Schwarms.