
HoloMed - Kontextsensitive Unterstützung eines Chirurgen im Operationssaal durch Augmented Reality
- Ansprechperson:
- Förderung:
- Projektbeteiligte:
1. mbits imaging GmbH
2. User Interface Design GmbH
3. Neurochirurgische Klinik der Universität Ulm
4. KIT - Intelligente Prozessautomation und Robotik (IAR-IPR) - Starttermin:
Juli 2017
- Endtermin:
Dezember 2019
Motivation
Computergestützte Verfahren in der Medizintechnik sollen den Arzt bei der Behandlung von Patienten unterstützen, um so die Wahrscheinlichkeit einer erfolgreichen Behandlung zu erhöhen. Dabei ist es wichtig, dass solche Systeme durch eine nutzerzentrierte Entwicklung nahtlos in den medizinischen Arbeitsablauf integriert werden und ein hohes Maß an Usability sichergestellt wird. Ist dies nicht der Fall, kann deren Einsatz aufgrund mangelnder Akzeptanz scheitern bzw. die Gesundheit des Patienten gefährden.
Zielsetzung
Das Vorhaben adressiert das Anwendungsszenario der Ventrikelpunktion am menschlichen Gehirn zur Drainage von Liquor. Die Punktion des Ventrikelsystems des Gehirns gehört hierbei zu den Routineprozeduren in der Neurochirurgie. Deutschlandweit werden etwa 20.000 solcher Punktionen entweder als eigenständiger Eingriff oder als Teil einer komplexeren Operation durchgeführt . Die Punktion erfolgt über eine Bohrlochtrepanation am sogenannten Kocher Punkt und die Stichrichtung des Katheters wird anhand äußerer anatomischer Landmarken festgelegt. Darüber hinaus müssen die anatomischen und pathologischen Besonderheiten des Patienten vom Chirurgen berücksichtigt werden. Häufig ist diese Prozedur in Notfallsituationen, wie z. B. bei Gehirnblutungen oder Schädel-Hirn-Trauma oder Schlaganfall angezeigt. Der Ventrikel liegt in etwa 4 cm Tiefe, hat eine längliche Form mit einer Breite von ca. 1 cm, die jedoch auf Grund der zugrundeliegenden Erkrankung stark variieren kann. Eine optimale Katheterlage wird nur in etwa 2/3 der Fälle erreicht wobei hierfür manchmal mehrfache Punktionsversuche erforderlich sind.
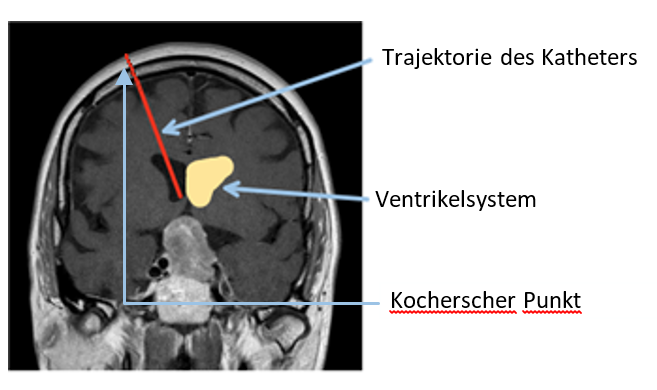
Abb. 2: Links: Koronarer Schnitt durch den Schädel (MRT, T1-Wichtung) in Höhe der Kranznaht.
Eine Ventrikelpunktion ist bei klinischen Zeichen einer Liquorzirkulationsstörung und dem bildmorphologischen Nachweis einer entsprechenden Veränderung in der Computer- oder Kernspintomographie indiziert. Der Eingriff kann in örtlicher Betäubung (Lokalanästhesie) oder in Allgemeinnarkose durchgeführt werden. Eine starre Fixierung des Kopfes ist nicht erforderlich. Für die Lokalisation der optimalen Punktionsstelle und -richtung gibt es mehrere anatomische Landmarken, die vom Chirurgen ertastet oder ausgemessen werden. Die ideale Stelle für die Bohrlochtrepanation liegt 1cm vor der Kranznaht, 2,5cm von der Mittellinie entfernt. Ist die Kranznaht nicht sicher zu ertasten, kann die Lokalisation anhand der Entfernung von der Nasenwurzel festgelegt werden. Nach Haarrasur, Hautdesinfektion und sterilem Abdecken der Inzisionsstelle wird eine Hautinzision von 3-4cm Länge angelegt und der Schädelknochen exponiert. Mit einem Trepan wird dann die Schädeleröffnung vorgenommen und die harte Hirnhaut mit einem Skalpell eröffnet. Die darunterliegende Gehirnoberfläche wird eröffnet und der an einem Stylet armierte Katheter langsam eingeführt (siehe Abb. 1). Die Stichrichtung ist dabei der gedachte Schnittpunkt zweier Linien, von denen eine die beiden äußeren Gehörgänge verbindet und die andere senkrecht am inneren Augenwinkel nach dorsal verläuft. Bei Verlagerung des Ventrikelsystems durch eine Blutung oder einen Tumor muss dabei die daraus resultierende Verschiebung ins Kalkül gezogen werden. Bei erfolgreicher Punktion kann in der Regel nach Penetration der Katheterspitze durch die Ventrikelwand ein deutlicher Widerstandsverlust getastet werden und nach Entfernung des Stylets entleert sich über den Katheter Liquor. Bei frustranem Versuch muss die Punktion erneut vorgenommen werden. Nach erfolgter Punktion wird der Katheter außerhalb der Hautinzision nach außen geleitet und die Wunde verschlossen. Eine schematische Darstellung des Eingriffs ist in Abb. 2 dargestellt. Die Schwierigkeit des Eingriffs besteht darin, das die Bestimmung des Einstichwinkels oft nur wenige Grad Toleranz zulässt und das Ziel nicht direkt visualisiert werden kann.
Das Vorhaben adressiert die Realisierung von Assistenz in hoch komplexen und kooperativen chirurgischen Abläufen durch eine flexible, mobile und kostengünstige Augmented Reality (AR)-Lösung. Der Operateur soll bei der Bestimmung und Festlegung des Einstichpunktes und des Einführwinkels durch eine AR-Brille unterstützt werden. Dies ist insbesondere deshalb interessant, da eine vollkommen neue Generation von AR-Technologie kurz vor der Markteinführung steht. Es soll die AR-Brille „Hololens“ von Microsoft eingesetzt werden, in der ein 3D-Kamerasystem integriert ist. Eine gute Alternative stellt die ebenfalls neue AR-Brille „Meta 2“ dar. Beide Brillen verfügen über ähnliche Sensorik und bauen zur Visualisierung auf dem Framework Unity 3D auf. Eine Übertragung der Lösungen von einer auf die andere Brille sollte dadurch mit mäßigem Mehraufwand möglich sein. Die Meta 2 AR-Brille konnte bisher nicht evaluiert werden, da diese noch nicht ausgeliefert wurde.
Den Ärzten sollen während der Operation die für sie relevanten Informationen durch einen intuitiven Zugriff ortsgenau in ihr Sichtfeld eingeblendet werden. Die Basis hierfür bilden die Daten aktueller CT- oder MRT-Scans des Patienten, aber auch aktuelle diagnostische Daten aus der elektronischen Patientenakte. Durch Einblendung der operationsrelevanten Informationen in das Sichtfeld des Arztes wird dieser ortsgenau informiert, wie er den Katheter optimal führen kann. Ihm soll der Kocher Punkt und der Führungskanal des Katheters angezeigt werden. Zur automatisierten Bestimmung dieser Informationen werden maschinelle Lernverfahren eingesetzt. Hierzu muss in einem ersten Schritt ein segmentiertes 3D-Modell des Kopfes erzeugt werden, woraus später der Zielpunkt im Ventrikelsystem bestimmt werden kann. Anhand der Landmarken des Schädels, d.h. Kranznaht und Nasenwurzel, kann dann der Kocher Punkt bestimmt werden. Dem Arzt soll die Möglichkeit zur Korrektur gegeben werden. Des Weiteren soll aus der Verfolgung des Verlaufs der Operation der aktuelle Zustand automatisiert bestimmt werden und somit die Möglichkeit geschaffen werden, dem Arzt situationsgerechte Informationen anzubieten. Im zugrundeliegenden Szenario wären dies bspw. Informationen zum Einführvektor. Das IPR hat hierzu bereits Forschungsarbeiten durchgeführt. Die größte Herausforderung stellt eine möglichst exakte Registrierung des virtuellen 3D-Modells auf den Kopf des realen Patienten dar. Fragestellungen der Registrierung bilden ein wiederkehrendes Problem und wurden am IPR in vielen Forschungsarbeiten adressiert. Hierbei kommt erschwerend hinzu, dass oft weite Teile des Patienten abgedeckt sind. Ein Lösungsvorschlag wäre eine initiale Registrierung bevor der Patient abgedeckt wird. Dadurch kann das 3D-Planungsmodell mit dem realen Kopf registriert werden. In diesem Zuge werden Marker um die Operationsstelle angebracht, die auch nach Abdeckung des Patienten sichtbar bleiben. Somit wird ein robustes Tracking ermöglicht. Dieser erste Ansatz soll im Laufe des Projektes verfeinert werden. Ein weiterer wichtiger Punkt ist dabei die Einhaltung von Sterilitätsrahmenbedingungen während der OP. Es muss daher untersucht werden, inwiefern das Markersystem bereits im sterilen Feld angebracht werden muss, bzw. der Einsatz auch außerhalb des Sterilbereichs möglich ist.
Das durch die Verwendung der Brille sehr flexible und mobile Konzept steht im Gegensatz zu gegenwärtig auf dem Markt verfügbaren Systemen. So sind Hybride OPs sehr teuer in der Anschaffung und im Unterhalt. Die vorgeschlagene Lösung in Form einer AR-Brille wird die Kosten für die Visualisierung und Assistenz drastisch senken. Es wird eine innovative, neuartige und kostengünstige Lösung angestrebt, die direkten Einfluss auf die Qualität solcher Eingriffe haben wird. Nach erfolgreicher Realisierung bei der Ventrikelpunktion wird die Erweiterung des Einsatzgebietes auf andere Operationen angestrebt. Die vorgeschlagene Lösung kann auch bei der Ausbildung von Ärzten vorteilhaft eingesetzt werden.
Zur Erstellung des Gesamtsystems müssen mehrere technische Teilsysteme konzipiert und implementiert werden. Das Ziel ist eine Überblendung eines Patienten-Planungsmodells auf den realen Patienten. Dabei ist ein robustes Tracking des Patienten während der OP von zentraler Bedeutung. Um dies zu erreichen, muss ein geeignetes Tracking-Verfahren implementiert werden. Hierzu wird ein optisches Trackingsystem von ART eingehend verwendet. Dieses wird durch das Tracking der Hololens ergänzt und durch Machine Learning verbessert, was wiederum eine Prozessanalyse voraussetzt, um ausreichend Trainingsdaten zu sammeln oder zu generieren. Im nächsten Schritt wird ein Patienten-Planungsmodell aus Scans eines Patienten erstellt. Dieser Schritt erfordert die Anbindung an das bestehende Kliniknetzwerk. Zum Abschluss wird das erzeugte Patienten-Planungsmodell auf den Kopf des realen Patienten überblendet. Begleitend zur technischen Implementierung erfolgt die Ausarbeitung der Benutzeroberfläche des Demonstrators, um den Neurochirurgen die richtigen Informationen zur richtigen Zeit zur Verfügung zu stellen und somit einen reibungslosen Operationsverlauf zu ermöglichen.