Datengetriebene Schätzung adäquater Greifsysteme für Industrieroboter
- contact:
- project group:
ROLE - Robot Learning Group
- funding:
Industry
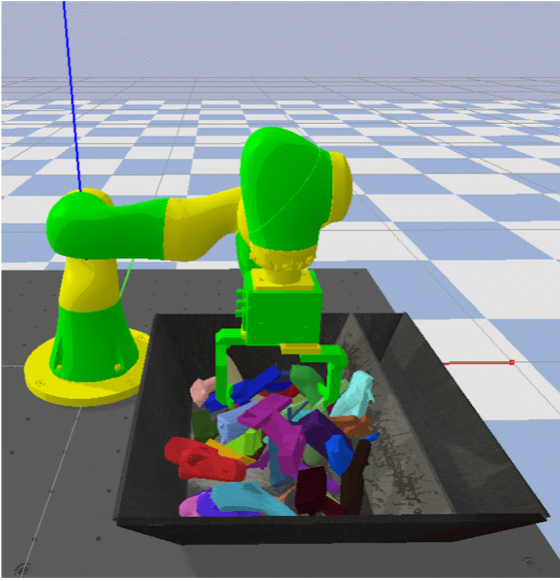
Für ein gegebenes Objekt, das von einem Industrieroboter gegriffen werden soll, wird in diesem Forschungsprojekt ein Ansatz entwickelt, welcher automatisch schätzt, welche Griffqualitäten mittels verschiedener Greifersysteme aus einem gegebenen Portfolio bestenfalls erreicht werden können.
Da klassische Greifplanung mit der Anzahl an möglichen Objekttypen und in Frage kommenden Greifsystemen kaum skaliert, werden in diesem Projekt stattdessen neuronale Netze eingesetzt, die auf Basis simulierter Roboterausführungen trainiert werden.
Zentrale Fragestellung ist dabei, wie Roboter-Simulationsumgebung, Netzwerktopologie und Trainingsalgorithmus so optimiert werden können, dass eine hohe Generalisierungsfähigkeit des Schätzers auf Objekte beliebiger Geometrie bei gleichzeitig vertretbarem Trainings- und Inferenzaufwand gewährleistet wird.