
ReApp: Wiederverwendbare Roboterapplikationen für flexible Roboteranlagen basierend auf Industrial Ros
- contact:
- project group:
- funding:
- Partner:
- startdate:
01/2014
- enddate:
12/2016
![]()
Mittelständische Unternehmen fertigen ihre Produkte oft auf Auftragsbasis in sehr kleinen Losgrößen. Dies führt zu einem erhöhten Bedarf an Flexibilität im Produktionsprozess, der sich wegen der steigenden Produktvariabilität auch bei Großunternehmen beobachten lässt. Beide haben folglich einen erhöhten Bedarf an flexiblen und wirtschaftlichen Automatisierungslösungen, die kurze Rüstzeiten und die Wiederverwendung von Produktionsprozessen ermöglichen.
Roboter per se sind frei programmierbar und können für eine Vielzahl von Aufgaben eingesetzt werden. Die aufwändige, zeitraubende und somit teure Programmierung von Robotersystemen sorgt jedoch dafür, dass Roboter nur bei großen Stückzahlen wirtschaftlich zur Automatisierung eingesetzt werden können. Deshalb sind Roboter oft keine Option zur Automatisierung in KMUs (Abbildung 1).
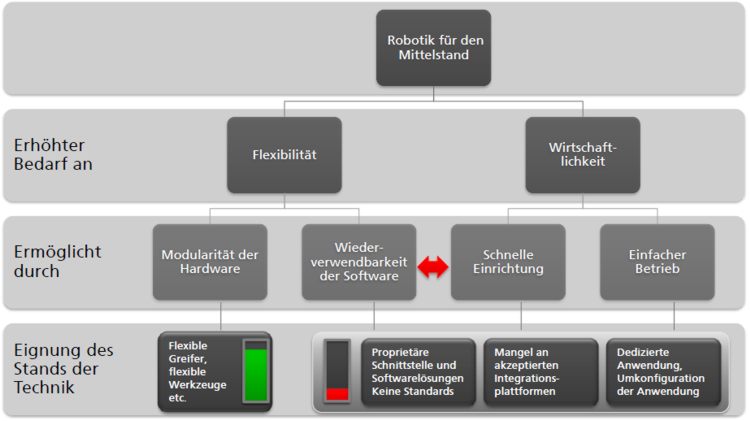
Abbildung 1: Eignung des Stands der Technik zur Erfüllung des erhöhten Bedarfs an Flexibilität und Wirtschaftlichkeit von Roboterlösungen für den Mittelstand
Um dies zu ändern, soll die Wirtschaftlichkeit und Flexibilität von roboterbasierten Automatisierungslösungen in ReApp durch die folgenden Entwicklungen signifikant gesteigert werden:
- Semantische Beschreibung der Fähigkeiten und Interaktionsschemata der Hardware-Komponenten (z.B. Roboter, Förderband etc.) mit standardisierten Schnittstellen und „Plug & Produce“- Funktion.
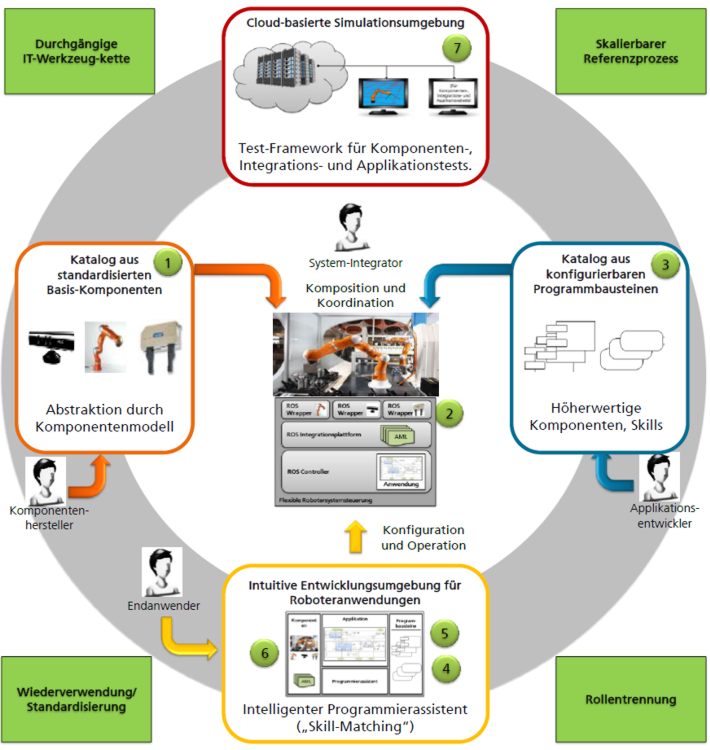
Abbildung 2: Lösungsansatz von ReApp
- Semantische Beschreibung der Software-Komponenten mit standardisierten Schnittstellen sowie mit Qualitätsmetriken versehene Programmbausteine (z.B. Bahnplanung, Objekterkennung etc.)
- Spezifizierung einer semantischer Fähigkeitsbeschreibungssprache zum Abgleich der verfügbaren Fähigkeiten des Robotersystems mit den Anforderung der Programmierbausteine („Skill-Matching“).
- Entwicklung einer intuitiven Entwicklungsumgebung und eines intelligenten Programmierassistenten für Roboteranwendungen: Verknüpfung der Programmbausteine zu Roboteranwendungen und Export lauffähige Programme
- Bereitstellung einer Integrationsplattform für das Systemintegration: Installation, Konfiguration von Komponenten und Ausführung Applikationen auf dem Robotersystem.
- Entwicklung einer cloud-basierten Simulationsumgebung zur systematischen Durchführung von Komponenten-, Integrations- und Applikationstests vor der Inbetriebnahme der realen Roboterzeller.