

Forschungsgebiete
Modulare Selbst-Rekonfigurierbare Roboter
Modulare, self-rekonfigurierbare Roboter sind autonome Maschinen die ihre Gesamtkonfiguration verändern können, indem sie Teile ihres Organismus an eine andere Stelle eigenständig umsetzen können um sich an neue Gegebenheiten oder neue Aufagben anzupassen oder um sich selbst zu reparieren.
Schwarmrobotik
Multirobotersysteme die sich aus vielen autonomen Robotern zusammensetzen. Hierbei basiert die Steuerung der Systeme auf Selbstorganisationseffekten, welche durch lokale Kommunikation und Stigmergie zu stande kommen.
Projekte





MICE
Seit 2014. DAAD-Programm des projektbezogenen Personenaustauschs (PPP) mit Tschechien.
Ziel von MICE (Multi-Robot-Systems In Complex Environments) ist es, neue Steuerungsmethoden für Multi-Robotersysteme zu entwickeln. Hierbei werden zwei verschiedene Klassen in Betracht gezogen. Die erste Klasse ist ein Team oder ein Schwarm von Robotern, die gemeinsam Aufgaben, wie z. B. das Kartographieren einer Umgebung, bewältigen. Diese Roboter können sich jedoch nicht miteinander verbinden. Hierfür wird die zweite Klasse von Robotern eingesetzt. Diese mobilen, modularen, selbst-rekonfigurierbaren Roboter können sich miteinander physisch verbinden. Dadurch sind sie in der Lage, Hindernisse zu überwinden, die ein einzelner Roboter nicht überwinden kann. In diesem Projekt werden neuartige Algorithmen für die Missionsplanung sowie Techniken für das Planen einer Roboterorganismus-Rekonfiguration entwickelt.
BMWi-Projekt SMIS
Seit 2013. In SMIS (Subsea Monitoring via Intelligent Swarms) arbeiten Ingenieure und Wissenschaftler gemeinsam an einem neuartigen Konzept zur autonomen Überwachung und Erkundung der maritimen Umwelt bis in Tiefen von 6.000 m, basierend auf druckneutraler Technologie. Dazu wird ein Team/Swarm aus Unterwasserfahrzeugen, Unterwasser-Bodenstation und Oberflächenfahrzeug eingesetzt. Durch neuartige Algorithmen zur Schwarmsteuerung und zur Kommunikation im Fahrzeugverbund lässt sich das System für die unterschiedlichsten Einsatzzwecke verwenden. Potentiale des Systems liegen in den Bereichen mariner Rohstoffgewinnung, Hydrographie, Kabel- und Pipeline-Trassierung, Überwachung von Fundamenten von Offshore-Windanlagen, etc.
Open-Source-Projekt Robot3D
Seit 2010. Robot3D (vormals bekannt als Symbricator3D) ist ein Open-Source-Projekt das im Rahmen der Projekte REPLICATOR und SYMBRION entwickelt wurde. Ziel dieser Plattform ist es, sowohl Schwarmroboter als auch modulare Roboter zu simulieren. Die Simulationsumgebung ist dabei modular gehalten, so dass verschiedenste Anwendungsmöglichkeiten und Experimente realisierbar sind. Die Plattform wird in den oben genannten Projekten unter anderem dafür genutzt, um sowohl biologisch motivierte Algorithmen zu untersuchen (z.B.: Hormon-basierte Organismussteuerung, Evolution von Roboterorganismen), als auch technisch orientierten Fragestellung nachzugehen (z.B. Kognitive Sensorfusion).
Zur Robot3D Webseite (englisch): hier.
EU-Projekt SYMBRION Enlarged EU
Seit 2010, Erweiterung des SYMBRION-Projektes.
Wanda Projekt
Seit 2009. Der Wanda-Schwarmroboter ist der Nachfolger von Jasmine und wurde von Marc Szymanski und Alexander Kettler entwickelt und im Rahmen des KIT-CoRoL Projektes verbessert. Dem IPR stehen zahlreiche Roboter inklusive Arena zur Verfügung, die für diverse Schwarmexperimente genutzt werden können.
EU-Projekt SYMBRION
Ab Juli, 2008. Das Ziel des Projekts ist die Erforschung und Entwicklung neuer Prinzipien der Adaption und Evolution von Organismen, die aus einer Vielzahl einzelner Roboter bestehen können. Hierfür sollen große Schwärme von Robotern in die Lage versetzt werden, sich zu einem komplexen Organismus zu vereinigen. Innerhalb einer solchen künstlichen Lebensform sollen sowohl Energie als auch Verarbeitungskapazitäten, ähnlich einer Symbiose, unter den einzelnen Entitäten ausgetauscht werden können. Durch die Aggregation zu einem größeren Organismus sollen komplexe Aufgaben, die für einen einzelnen Roboter oder auch einen Schwarm solcher nicht zu bewältigen sind, lösbar werden.
Die Projekte SYMBRION und REPLICATOR sind eng miteinander verknüpft, da sie auf den selben Roboterplattformen aufbauen. Während SYMBRION jedoch biologisch-motivierten Fragestellungen nachgeht, stehen beim REPLICATOR-Projekte mehr die technischen Herausforderungen im Vordergrund. Mehr.
Zur Webseite (englisch): hier
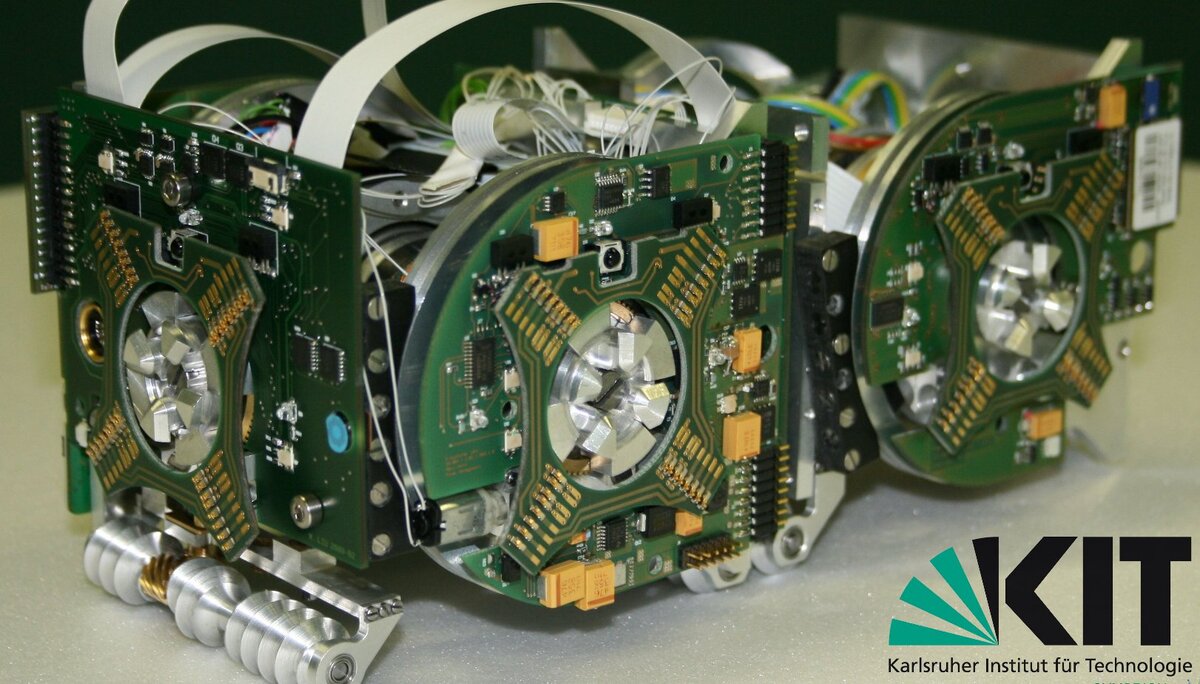
EU-Projekt REPLICATOR
Ab Juli, 2008. In diesem Projekt werden mobile, autonome Roboter entwickelt, die sowohl in der Lage sind, als Schwarm zu agieren, als auch sich selbstständig zu künstlichen Organismen zusammenzusetzen um Aufgaben zu lösen, die sie allein nicht in der Lage wären. Die Roboterplattform kann um modulare Zusatzsysteme wie zum Beispiel Beine oder Räder erweitert werden, die die Flexibilität und Adaptivität des Organismus zusätzlich erweitern. Das Hauptziel des Projektes ist die Entwicklung neuartiger Prinzipien und Methoden im Bereich von Selbst-Konfiguration, Selbst-Anpassung und Selbst-Lernen, welche in den Roboterorganismen zur Anwendung kommen. Durch biologisch motivierte Ansätze aus dem Bereich der Evolution können dann Organismen entstehen, die eigene Strukturen und neue Funktionen entwickeln, um letztendlich selbstständig ohne menschliche Überwachung operieren zu können.
Ein mögliches Anwendungsgebiet dieser Robotersysteme ist die autonome Überwachung von für den Menschen unzugänglichen oder gefährlichen Bereichen im Rahmen eines Sensornetzwerkes, da die Roboter aufgrund Ihrer Eigenschaften selbstständig in der Lage sind, sich auch in schwierigem Gelände zu verteilen und Informationen zu sammeln. Mehr.
Zur Webseite (englisch): hier
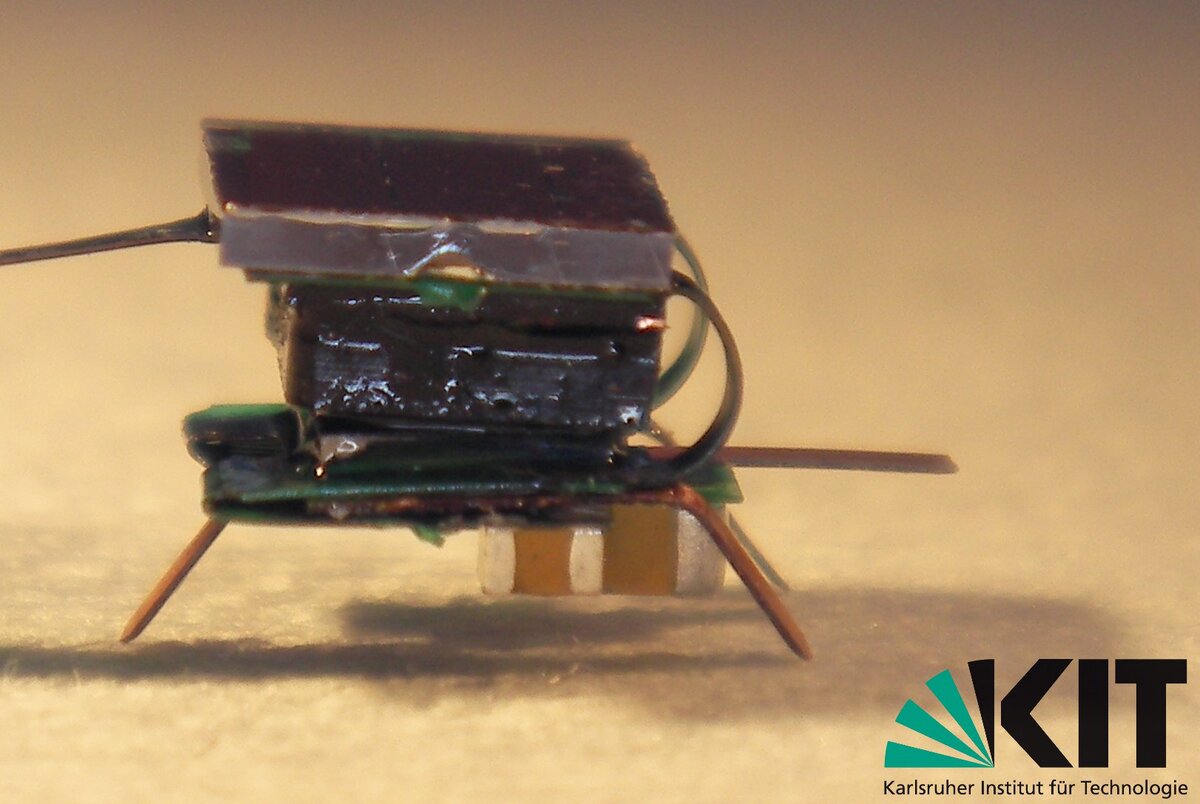
EU-Projekt I-SWARM
Okt, 2007 - Juni 2008. Ziel des I-SWARM Projektes war es einen Schwarm von Miniaturrobotern mit einer Kantenlänge von 3mm zu entwickeln. Die Hauptaufgaben des IPRs bestanden darin die Steuerung für diese Roboter zu entwerfen und zu implementieren. Mehr.
Open Robot Projekt JASMINE
Dieses Projekt ist als ein Teilprojekt vom I-SWARM-Projekt entstanden. Sein Ziel ist es eine offene Roboter-Plattform für Schwarm-Experimente, Schwarm-Spiele, etc. zu entwickeln.
Sonstiges
In den Medien
Quarks und Co - Das Geheimis des Schwarms (WDR 10.04.2007)
hitec - Die geheimen Baupläne der Natur (3SAT 20.01.2008)