
Uni für Einsteiger 2019
Im Rahmen der Veranstaltung "Uni für Einsteiger" am 20.11.2019 konnten sich Studieninteressierte einen Einblick in die Forschung und Lehre am KIT verschaffen. Auch das IAR-IPR beteiligte sich daran.

Die Besuchergruppe wurde im Foyer des Instituts empfangen und durch die Labore geführt, wo die wissenschaftlichen Mitarbeiter ihre jeweiligen Arbeiten vorstellten.
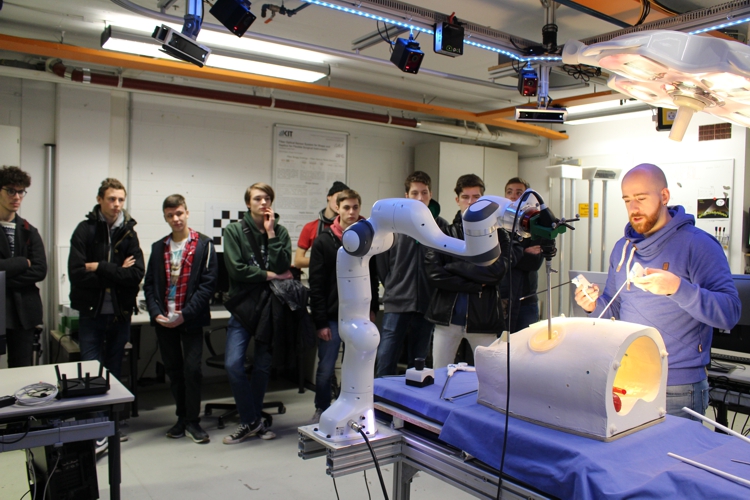

Die Führung begann im Medizintechnik-Labor, wo unter anderem an Techniken für die minimalinvasive Chirurgie gearbeitet wird. Bei der minimalinvasiven Chirurgie wird mit speziellen Werkzeugen durch kleinste Einschnitte im Körper hindurch operiert, um das menschliche Gewebe so wenig wie möglich zu schädigen. Paul Scheikl zeigte, wie Roboter den Arzt bei dieser anspruchsvollen Aufgabe unterstützen können.

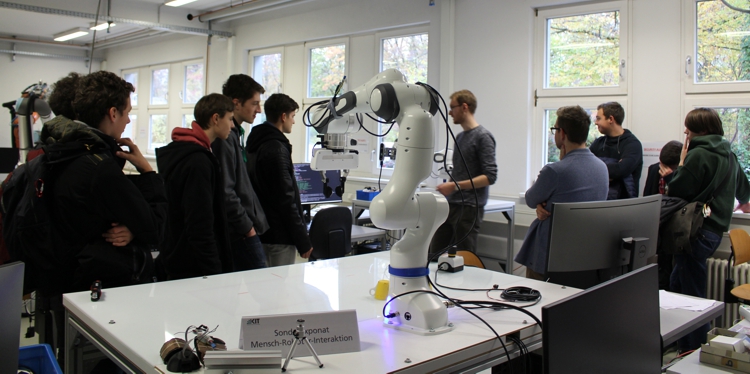
Als nächstes präsentierte Wolfgang Wiedmeyer verschiedene Demoprojekte im KUKA Robot Learning Lab. Das Labor ermöglicht es, zu Lehrzwecken Industrieroboter vom Typ KUKA LBR iiwa über das Internet zu programmieren. So können Lernende auf der ganzen Welt Erfahrungen auf echten Industrierobotern sammeln, auch wenn sie nicht selbst über die teure Hardware verfügen, die normalerweise dafür notwendig ist.
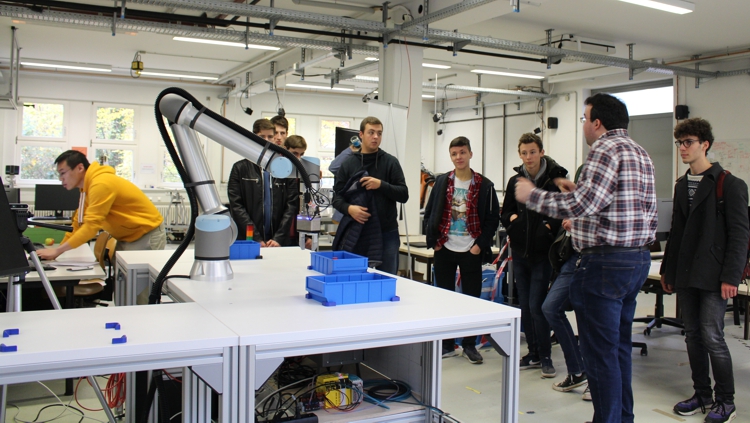
Weiter ging es in der Roboterhalle, in der verschiedenste Versuche mit Industrierobotern durchgeführt werden, wie zum Beispiel der "Griff in die Kiste": In der heutigen Automatisierungstechnik sind Roboter meist darauf angewiesen, dass ihnen Werkstücke in einer fest definierten Position und Ausrichtung übergeben werden. Lars Berscheid zeigte, wie Roboter mittels maschinellem Lernen dazu in die Lage versetzt werden können, verschiedene Werkstücke aus zufälligen Lagen zu greifen, ohne vorher explizit dafür programmiert worden zu sein.
Ilshat Mamaev demonstrierte anhand eines Hütchenspiels, wie Roboter mit kapazitiven Sensoren verdeckte Objekte detektieren können. Außerdem zeigte er den "Slamdog 2.0", eine mobile Plattform, an der Studenten im Rahmen von Praktika Hardware- und Softwarearbeiten durchführen können.
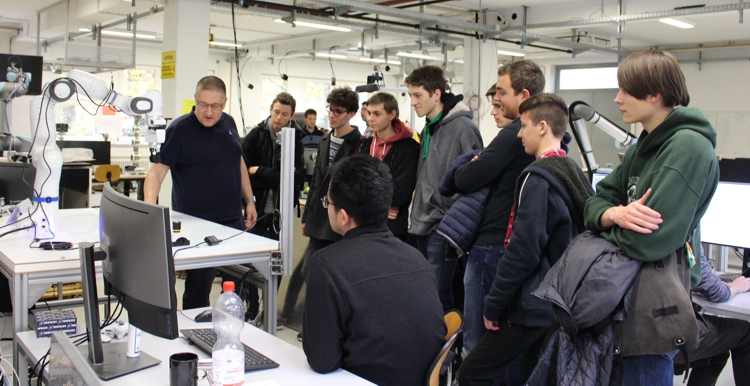
Abschließend führte Patrick Schlosser den RoboShield-Demonstrator vor. Dabei handelt es sich um eine Demonstrationsanlage, an der verschiedene Techniken zur sicheren Zusammenarbeit von Mensch und Roboter gezeigt und erprobt werden können, beispielsweise eine sichere Erfassung des Menschen mittels Laserscanner und Kamera, eine Nachgiebigkeitsregelung durch Handführung des Roboters und vieles mehr.

Nach Abschluss der Demonstrationen hatten die Schüler noch Gelegenheit, sich bei den einzelnen Mitarbeitern über ihren Arbeitsalltag und ihre Erfahrungen im Studium zu informieren.