
MAFRO - Manipulatorgestütztes Freimessen von Oberflächen
- Ansprechpartner:
Prof. Dr.-Ing. Björn Hein
Dipl.-Inform. Simon Notheis
Dipl.-Inform. Michael Mende - Projektgruppe:
- Förderung:
- Partner:
Institut für Technologie und Management im Baubetrieb (TMB) - KIT
- Starttermin:
September 2011
- Endtermin:
Dezember 2015
![]()
Das BMBF-geförderte Projekt MAFRO (Manipulatorgestütztes Freimessen von Oberflächen) ist eine KIT-interne Kooperation zwischen dem TMB (Institut für Technologie und Management im Baubetrieb) und dem IPR, um die automatisierte Dekontamination von Oberflächen zu erreichen.
Die sichere Dekontamination spielt beim Rückbau kerntechnischer Anlagen eine wesentliche Rolle, unabhängig davon ob die Kerntechnik als Übergangstechnologie aufgefasst wird und ein endgültiger Ausstieg geplant ist oder ob man bestehende, alte Anlagen am Ende ihrer Lebenszeit durch neue ersetzen muss. Insbesondere seit der Beschlussfassung „13. Gesetz zur Änderung des Atomgesetzes“ durch den Deutschen Bundestag am 30. Juni 2011 ist die Energiewende in Deutschland erheblich beschleunigt worden.
Beim manuellen Vorgehen erfolgt der Oberflächenabtrag durch einen Techniker von Hand, genauso wie das Messen der Restradioaktivität der Oberflächen, was arbeitsaufwendig ist und auch Strahlungsrisiken birgt. Automatisierte Verfahren zur Dekontamination von großen Betonflächen und Wänden, wie sie z.B. im Reaktorgebäude vorkommen, sind daher wünschenswert.
Das im Rahmen des Vorprojektes MANOLA (Oberflächenabtrag durch Lasertechnologie) beim TMB aufgebaute System besteht aus einem Transportsystem mit Kettenantrieb, das den Manipulator zum Einsatzort bringt, sowie dem Manipulator selbst, der sich mittels Vakuumsaugern auch auf vertikalen Flächen bewegen kann. Aufbauend auf MANOLA, dessen Schwerpunkt neben der Entwicklung des Manipulators auf der Bearbeitung der Oberfläche lag, soll in MAFRO ein neuartiger Arbeitskopf zum Freimessen von Oberflächen sowie ein Navigations-Algorithmus inkl. Bahnplanung und Steuerung entwickelt werden.
Der Fokus des TMB liegt dabei im Bau des Detektorkopfes und der Konzeption eines Wechselsystems zwischen Laserarbeitskopf und Messkopf für das Manipulatorsystem, wodurch ein automatisiertes Freimessen von Oberflächen möglich ist (Details siehe Projektseite des TMB).
Der Manipulator soll sich völlig autark an Oberflächen bewegen können, während gleichzeitig die zu bearbeitende Fläche über Sensoren vermessen und optimal abgefahren werden kann. Hierfür wird am IPR durch die Arbeitsgruppe IIROB ein Navigations-Algorithmus inkl. Modellbildung entwickelt, um mit der dazugehörigen Steuerung eine optimale Bahnplanung für den Manipulator zu erhalten. Die Planungsergebnisse können am Leitstand in der Simulation kontrolliert werden, die Überwachung der Ausführung basierend auf Sensor- und Kameradaten sowie die teleoperierte Steuerung von Transportsystem und Manipulator sind ebenso möglich.
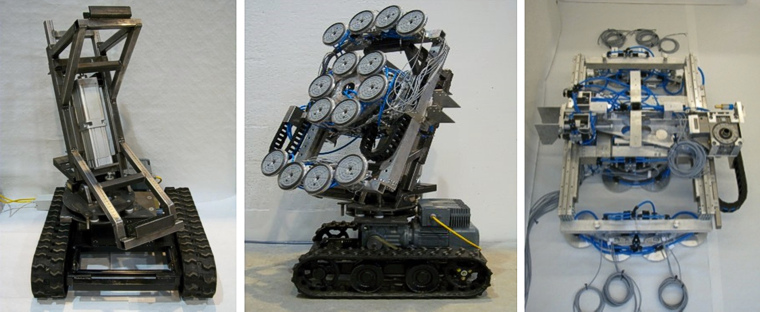
Transportsystem mit Manipulator [TMB]
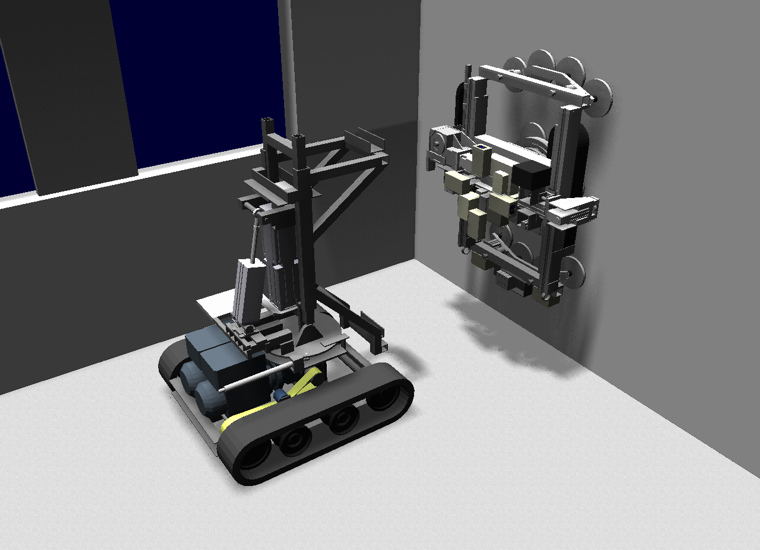
Transportsystem und Manipulator in der Simulationsumgebung des IIROB-Frameworks