IPR präsentiert zwei Projekte auf den 4ten SCHUNK ExpertDays
The IPR was represented with two stands at the Schunk ExpertDays on 23th and 24th of February 2001.
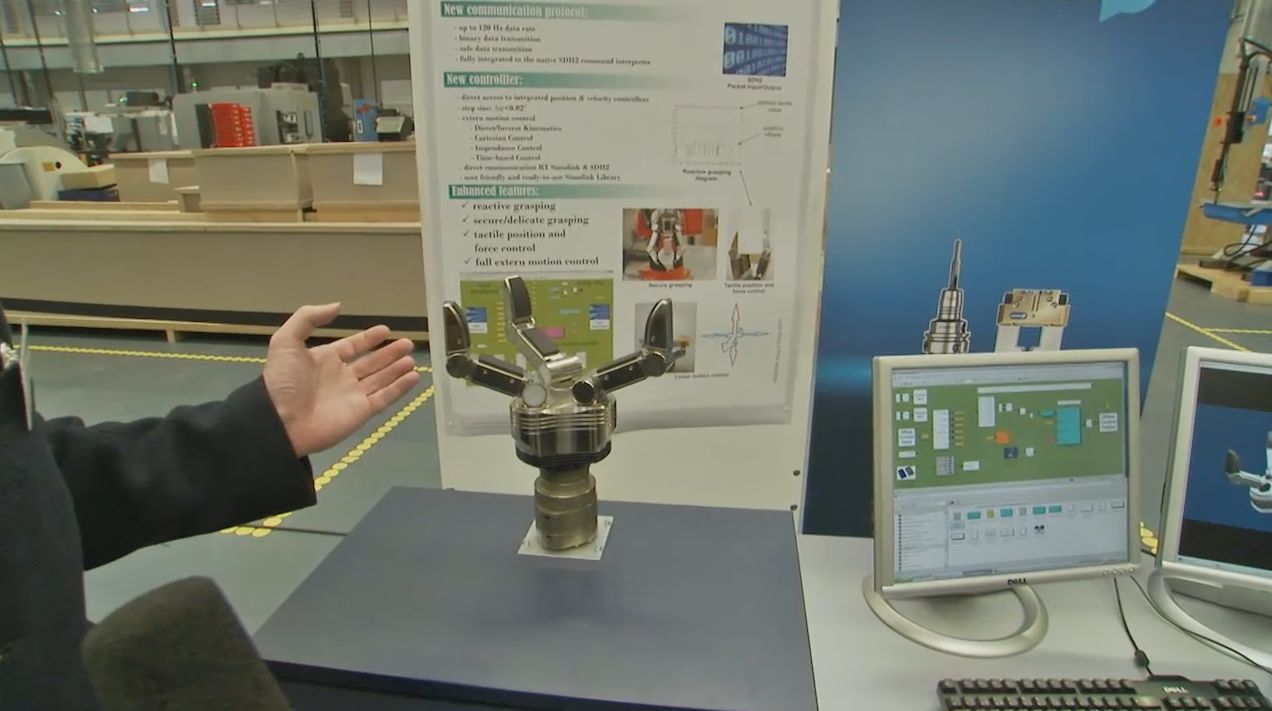
The “MCorrPro” a control concept developed by Thomas Haase, Ilshat Mamaev and Prof. Wörn at the IPR was presented at the 5. Schunk ExpertDays 2011. This concept allows for the first time a completely external control of the Multi-fingered Robotic Hand.
The new downwardly compatible data protocol with a bit rate of more than 100 Hz was included in the official firmware of SCHUNK and allows intelligent fusion of tactile sensor systems and the offset-based Finger Control.
An abstract can be taken from the following link:
Overview Control: Konzept.pdf
Photos on 1-en project:

Furthermore Dr.-Ing. Björn Hein, Simon Notheis and Michael Mende presented a mobile service robot, consisting of a platform, a modular robot arm with 7 degrees of freedom and a gripper, as well as a sensor head in the form of a pan-/ tending unity.
This could be teleoperated or controlled by an innovative user's mobile device with multimodal input and output interfaces, also developed at the IPR.
Controlling the arm over the panel equipped with collision protection of the arm and the platform, the collision distance was shown by different modalities, for example haptic, auditory or visual, to allow a intuitive and safe appliance.
The platform could be moved freely around due to the inbuilt inertial sensors in the operators panel.
It is possible when operated tele-operatively, to control the robot wirelessly through a Head Mounted Display (HMD) with inbuilt inertial sensor and a 6 axis controller. The steering can be achieved with the controller in connection with overlayed menus inside the HMD.
This allows a complete immersive experience for the operator, the head movements control the sensor head on the robot, thus the 3D and 2D cameras from the Kinect Sensor can be used directly.
Photos on 2-en project:

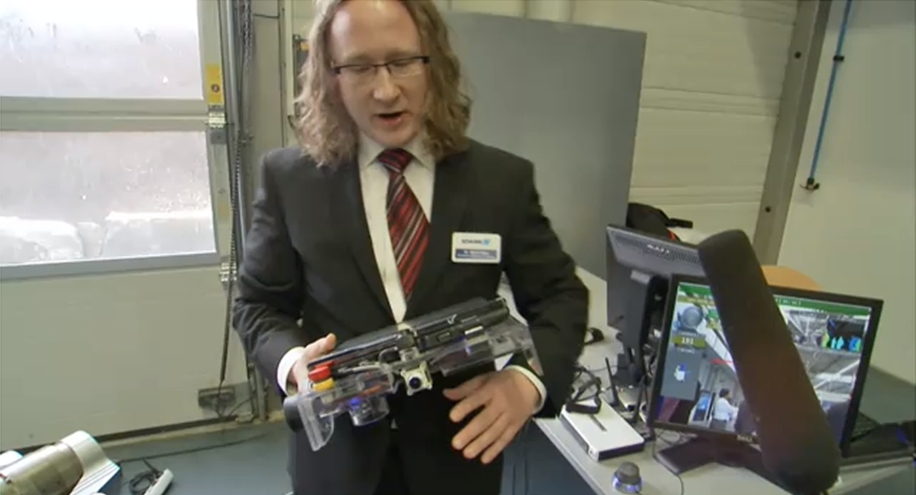

Photo source: SCHUNK