IPR präsentiert zwei Projekte auf den 4ten SCHUNK ExpertDays
Auf den Schunk Expert Days am 23. und 24. Februar 2011 war das IPR mit zwei Ausstellungsständen vertreten.
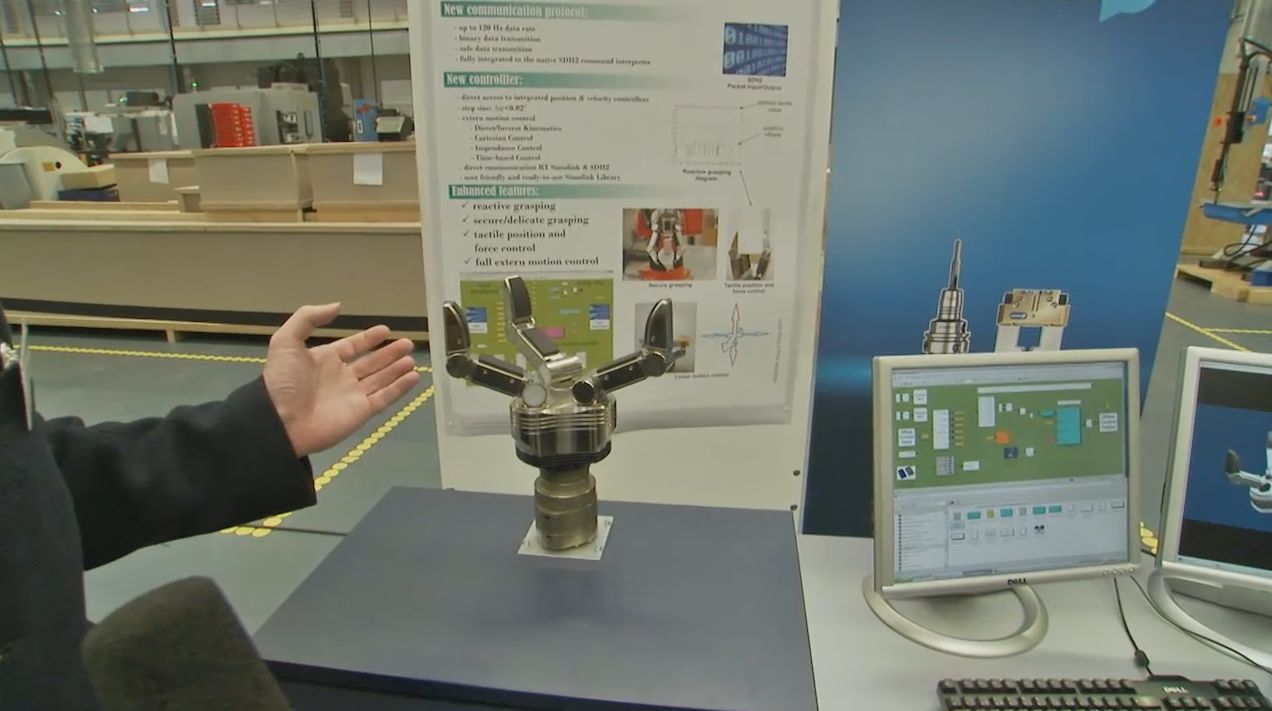
Im Rahmen des Kooperationsprojektes "SCHUNK - IPR: Entwicklung reaktiver Greifskills für die SDH2" wurde auf den diesjährigen 5. SCHUNK Expert Days 2011 das am IPR von Thomas Haase, Ilshat Mamaev und Prof. Heinz Wörn entworfenes Ansteuerungskonzept "MCorrPro" vorgestellt, das erstmals einen vollständigen extern geregelten und gesteuerten Zugang zum Mehrfingergreifer ermöglicht. Das neue, abwärtskompatible Datenprotokoll mit einer Datenrate von deutlich über 100Hz wurde in die offizielle Firmware der Fa. SCHUNK integriert und ermöglicht intelligente Verknüpfungen zwischen taktiler Sensorik und der Offset-basierten Fingeransteuerung.
Eine Übersicht der Ansteuerung kann folgendem Link entnommen werden:

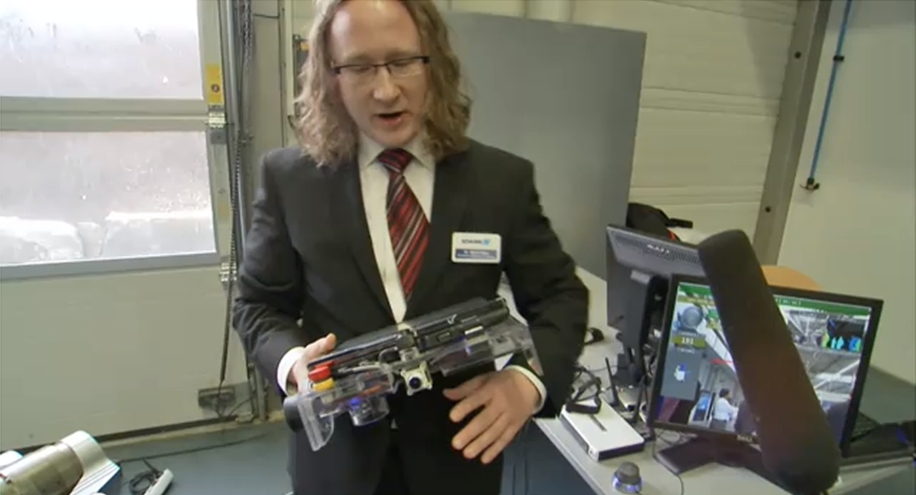
Des Weiteren präsentierten Dr.-Ing. Björn Hein, Simon Notheis und Michael Mende einen mobilen Serviceroboter bestehend aus einer Plattform, einem modularen Roboterarm mit 7 Freiheitsgraden und Greifer sowie einem Sensorkopf in Form einer Schwenk-/Neigeeinheit. Diese konnte sowohl teleoperiert als auch über ein am IPR entwickeltes neuartiges Nutzergerät mit multimodalen Ein- und Ausgabeschnittstellen gesteuert werden. Bei der Ansteuerung des Arms über das Panel mit Eigenkollisionsschutz von Arm und Plattform wurde die Kollisionsdistanz in Form von verschiedenen Modalitäten, z.B. haptisch, auditiv und visuell dargestellt, um eine intuitive und sichere Bedienung zu ermöglichen. Die Plattform selbst konnte auch dank der verbauten Inertialsensorik durch Bewegen des Bediengerätes frei im Umfeld des Standes gefahren werden.
Im teleoperierten Fall war es möglich, den Roboter über ein Head Mounted Display (HMD) mit Inertialsensor und einen 6-Achs-Controller kabellos zu bedienen. Die Steuerung selbst konnte hierbei mittels des Controllers in Verbindung mit eingeblendeten Bedienmodi und Menüs in der grafischen Oberfläche realisiert werden. Dabei wurden, um einen immersiven Eindruck bei der Telepräsenz zu erzeugen, die Kopfbewegungen des Nutzers direkt in Bewegungen des Sensorkopfes umgesetzt, während der Benutzer über das HMD Tiefenbilder und 2-D-Kamerabilder des auf dem Sensorkopf verbauten Kinect-Sensors angezeigt bekam.


Bildquelle: SCHUNK